








论文标题:GRNet: Gridding Residual Network for Dense Point Cloud Completion
标签:有监督 | 点云补全
1 motivation
现存的MLP方法对点的表征具有很大的局限性,不能充分考虑点云(局部点)的几何结构和局部上下文信息。事实上这应该是以PointNet为代表的使用MLP(本质上就是1*1卷积)作为表征工具的一大类方法的局限性,限制了其生成更加discriminative特征的潜力。
但是3D grid却可以做到很好地捕获点云的局部信息和结构,因为grid这种规则数据对于CNN是非常友好的,可以很大程度发挥卷积神经网络的威力。
目前几种常见点云处理方法的思路及其不足:
voxelize point into binary voxels: 这种从连续空间(点云)到离散空间(voxel)的做法会导致几何形状信息不可逆转的损失。
MLP: 这一类方法使用最大池化来聚集点与点之间的信息(point-wise feature),从而期望获得一个全局特征,这种做法没有充分考虑点和点之间的连接关系和邻点之间的上下文信息。PointNet++和DGCNN等方法就是为了弥补这一问题而设计的
GCN: 对点的密度是非常敏感的。
others: (摘自原文)Several attempts in point cloud segmentation have been made to capture spatial relationships in point clouds through more general convolution operations.SPLATNet and InterpConv perform convolution on high-dimensional lattices and 3D cubes interpolated from neighboring points. both of them are based on a strong assumption that the 3D coordinates of the output points are the same as the input points and thus can not be used for 3D point completion.
这里想说的是也有一些方法是直接将点云映射到一些规则结构上的(比如high-dimensional lattices and 3D cubes),但是这类方法依赖一个很强的假设,就是输入和输出的点云的三维坐标是相同的,这明显不能应用在补全任务上。
另外,直接使用CD loss也会存在一些问题,也需要改进,具体后面会说。
2 contribution
- 将3D grid引入作为点云表征的一种新方式。可以较好保留点云的结构信息和上下文信息。
- 结合3D grid的idea开发了一系列模块:gridding,gridding reverse,cubic feature sampling,gridding loss等来实现补全
- 大量的实验,基于ShapeNet,Completion3D,KITTI数据集的补全实验,取得了最SOTA的结果
3 solution
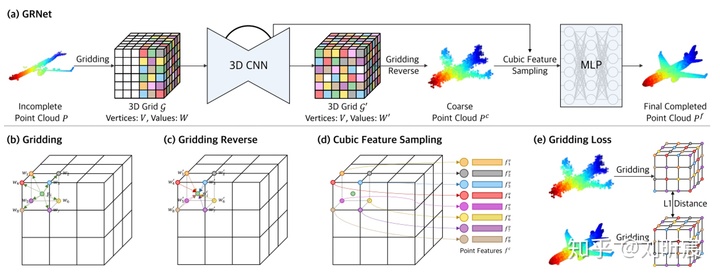
GRNet pipeline:
- 将点云gridding(不是直接简单地体素化)
- 3D CNN
- 体素点云化(获得粗糙点云)
- cubic feature sampling and MLP(获得精细点云,即最终输出补全点云)
本文的核心创新模块主要有上图中的:gridding,gridding reverse,cubic feature sampling,gridding loss
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 656
656











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









