







| 第1章 | 回到目录 | 第3章 |
|---|
第2章-基于速度估计的多欧拉-拉格朗日系统分布式控制
2.1 引言
2.2 模型与问题描述
2.2.1 欧拉-拉格朗日系统
2.2.2 问题描述
2.3 动态领航者状态估计器设计
滑模估计器
2.5 仿真验证
设计估计器,利用公式(2.5a、2.5b、2.5c)进行领航者状态估计
% 函数
clear
% 领航者状态:Q0
% 领航者速度:V0
% 领航者加速度:A0
% 跟随者估计位置:P_EsX、P_EsY
Q0 = [0 0]';
V0 = [0 0]';
A0 = [0 0]';
P_EsX_t0 = [pi/7*1, pi/7*2, pi/7*3, pi/7*4];
P_EsY_t0 = [pi/8*1, pi/8*2, pi/8*3, pi/8*4];
V_EsX_t0 = [0, 0, 0, 0];
V_EsY_t0 = [0, 0, 0, 0];
A_EsX_t0 = [0, 0, 0, 0];
A_EsY_t0 = [0, 0, 0, 0];
% 时间参数
tBegin = 0;
tEnd = 10;
dT = 0.1;
% 关系参数
alpha1 = 1.5;
alpha2 = 1.5;
alpha3 = 1.5;
% 跟随者之间关系矩阵
L = [0 0 0 0;
-1 1 0 0;
0 -1 1 0;
0 0 -1 1;];
% 与领航者关系矩阵
B = [1;
0;
0;
0;];
[TP, P_EsX] = ode45(@(t,P_EsX) -alpha1 .* sign( L*P_EsX + B.*(P_EsX-( sin(t))) ), [tBegin,tEnd], P_EsX_t0);
[TPY,P_EsY] = ode45(@(t,P_EsY) -alpha1 .* sign( L*P_EsY + B.*(P_EsY-(-sin(t))) ), [tBegin,tEnd], P_EsY_t0);
P_EsX(:,5) = sin(TP);
P_EsY(:,5) = -sin(TPY);
[TV, V_EsX] = ode45(@(t,V_EsX) -alpha2 .* sign( L*V_EsX + B.*(V_EsX-( cos(t))) ), [tBegin,tEnd], V_EsX_t0);
[TVY,V_EsY] = ode45(@(t,V_EsY) -alpha2 .* sign( L*V_EsY + B.*(V_EsY-(-cos(t))) ), [tBegin,tEnd], V_EsY_t0);
V_EsX(:,5) = cos(TV);
V_EsY(:,5) = -cos(TVY);
[TA, A_EsX] = ode45(@(t,A_EsX) -alpha3 .* sign( L*A_EsX + B.*(A_EsX-(-sin(t))) ), [tBegin,tEnd], A_EsX_t0);
[TAY,A_EsY] = ode45(@(t,A_EsY) -alpha3 .* sign( L*A_EsY + B.*(A_EsY-( sin(t))) ), [tBegin,tEnd], A_EsY_t0);
A_EsX(:,5) = -sin(TA);
A_EsY(:,5) = sin(TAY);
% 绘制结果图
figure(1)
subplot(2,1,1)
plot(TP,P_EsX(:,1), TP,P_EsX(:,2), TP,P_EsX(:,3), TP,P_EsX(:,4), TP,P_EsX(:,5),'linewidth',1.5 );
legend('运动体1','运动体2', '运动体3','运动体4', '运动体0'); title('机械臂位置估计');
xlabel('t/s'); ylabel('q_{i(1)}/rad');
grid on
subplot(2,1,2)
plot(TPY,P_EsY(:,1),TPY,P_EsY(:,2),TPY,P_EsY(:,3),TPY,P_EsY(:,4),TPY,P_EsY(:,5),'linewidth',1.5 );
legend('运动体1','运动体2', '运动体3','运动体4', '运动体0'); title('机械臂位置估计');
xlabel('t/s'); ylabel('q_{i(2)}/rad');
grid on
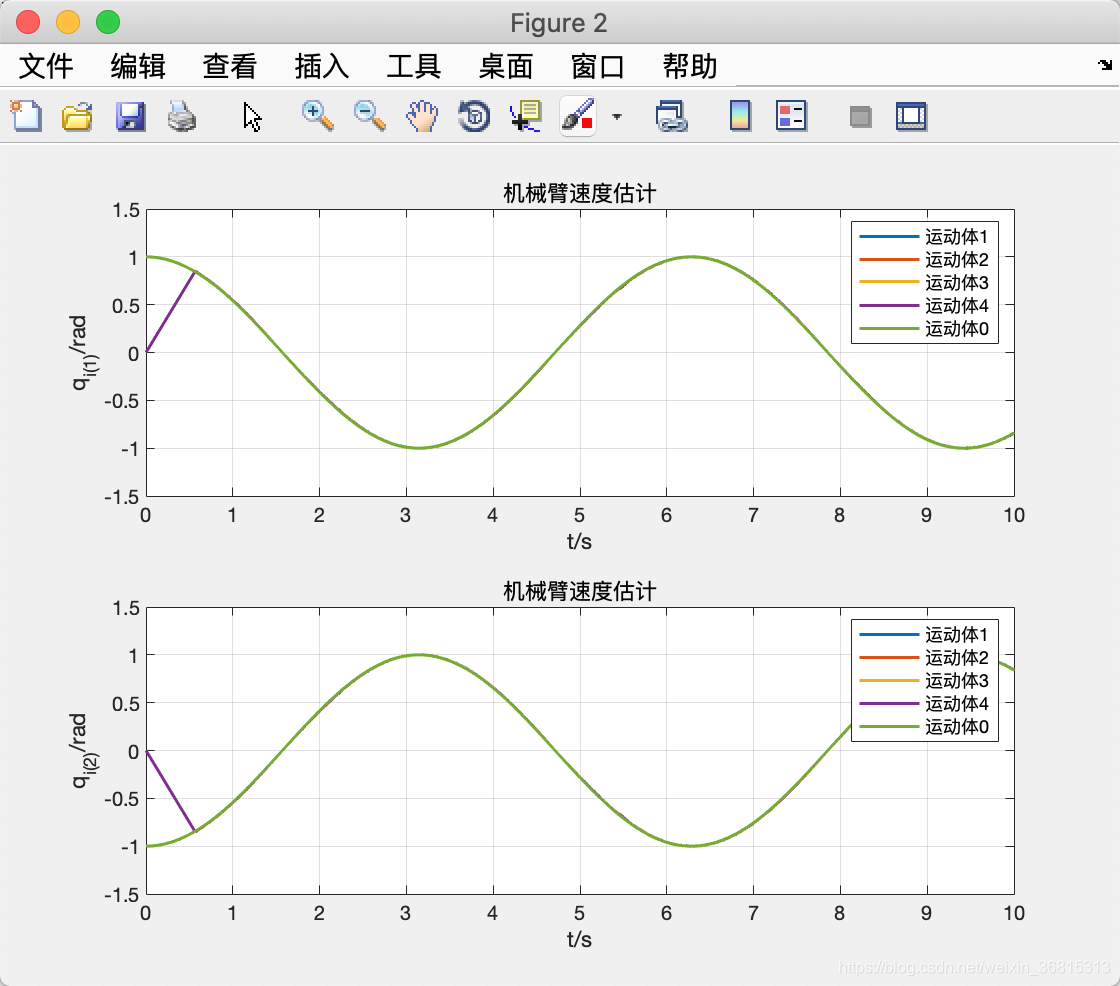
figure(2)
subplot(2,1,1)
plot(TV,V_EsX(:,1), TV,V_EsX(:,2), TV,V_EsX(:,3), TV,V_EsX(:,4), TV,V_EsX(:,5),'linewidth',1.5 );
legend('运动体1','运动体2', '运动体3','运动体4', '运动体0'); title('机械臂速度估计');
xlabel('t/s'); ylabel('q_{i(1)}/rad');
grid on
subplot(2,1,2)
plot(TVY,V_EsY(:,1),TVY,V_EsY(:,2),TVY,V_EsY(:,3),TVY,V_EsY(:,4),TVY,V_EsY(:,5),'linewidth',1.5 );
legend('运动体1','运动体2', '运动体3','运动体4', '运动体0'); title('机械臂速度估计');
xlabel('t/s'); ylabel('q_{i(2)}/rad');
grid on
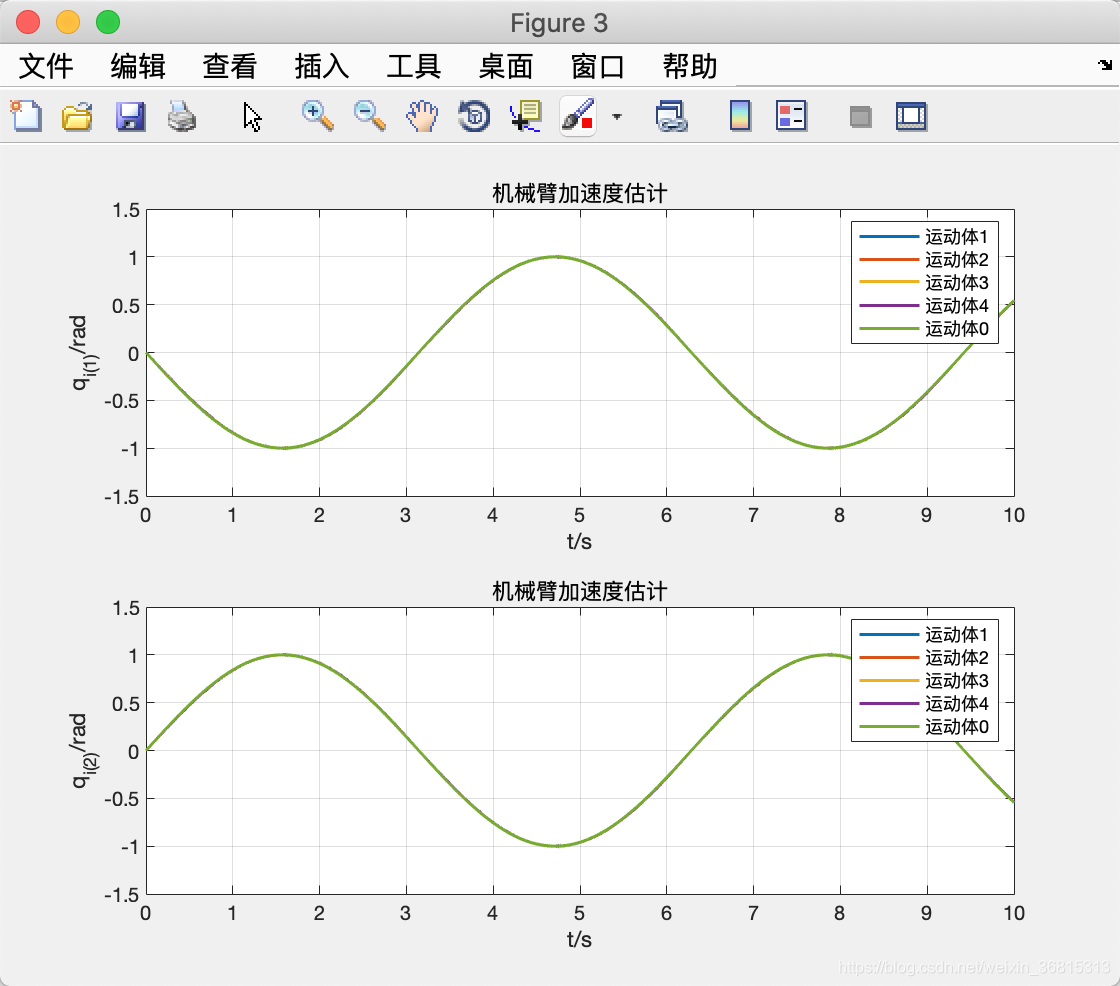
figure(3)
subplot(2,1,1)
plot(TA,A_EsX(:,1), TA,A_EsX(:,2), TA,A_EsX(:,3), TA,A_EsX(:,4), TA,A_EsX(:,5),'linewidth',1.5 );
legend('运动体1','运动体2', '运动体3','运动体4', '运动体0'); title('机械臂加速度估计');
xlabel('t/s'); ylabel('q_{i(1)}/rad');
grid on
subplot(2,1,2)
plot(TAY,A_EsY(:,1),TAY,A_EsY(:,2),TAY,A_EsY(:,3),TAY,A_EsY(:,4),TAY,A_EsY(:,5),'linewidth',1.5 );
legend('运动体1','运动体2', '运动体3','运动体4', '运动体0'); title('机械臂加速度估计');
xlabel('t/s'); ylabel('q_{i(2)}/rad');
grid on

Ref
[134] Cooperative Control of Nonlinear Multi-agent Systems with only
Relative Position Measurements



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











