






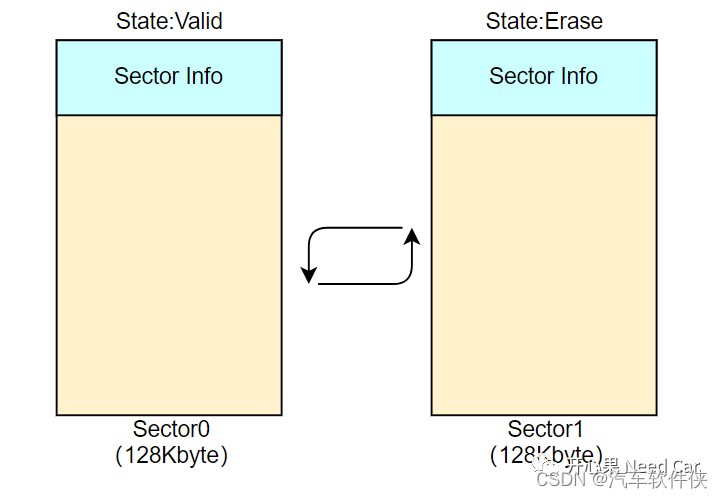
1.NVM切页,就是在两个等大小的DFlash空间(模拟EEPROM)不断地Copy有效数据,如下所示:
目前CP是面向功能的FOA架构,广泛应用于传统嵌入式处理器中,如发动机控制器、电机控制器、ADAS域控制器中的MCU等。AP则面向服务的SOA架构,应用于针对高计算能力、高带宽通信、分布式部署的智能驾驶域控制器和座舱控制器的SOC上。
OEM可以通过PREEvision设计整车EE架构****,定义通信数据等,然后导出基于ECU抽象的*.arxml文件提供给供应商。**通过DaVinci Developer等工具可以导出应用层SWC的 .arxml文件*。基于模型的应用层软件工具(如Matlab)可以利用该应用层接口文件生成满足AUTOSAR标准的应用层源码(C和H文件)。
而基础软件部分可以通过导入ECU抽象的*.arxml文件和ODX诊断数据库等文件,在DaVinci Configurator中进行详细配置,生成RTE和各个BSW模块的源码(.c和h文件)。基础软件、RTE和应用软件的源码合在同一个工程项目中后,就可以通过编译器生成可以刷写到ECU上的可执行代码(如hex或elf)。
这个高效配置的工作流,既可以让开发者专注关键功能设计,又能保障生成的源码质量,是汽车基础软件优势的一个实践体现。
BswM下本身分为modeArbitration , modeControl , general三大配置组
1,modeArbitration
arbitration主要用于条件判断的搭建,类比于C语言中if 判断条件。其下有四个配置组
1)logicExpressions
设置各种条件(modeCondition)逻辑组合,与或非异或等
2)modeConditions
3)requestports
4) rules
做汽车电子AUTOSAR软件开发的朋友,经常遇到一个问题是,如何使用调试工具跟踪OS相关信息。测试并分析CPU的负载率,OS的调度,Task的切换等信息
BswM模块中包含车辆模式管理和应用模式管理。作用是根据简单的规则仲裁来自应用层swcs或其他BSW的模式请求,并根据仲裁申请采取行动
一辆2025年生产的智能汽车代码量预计将达7亿行,相较于2022年将增加2.3倍,汽车软件开发需求将爆发式增长,整车软件成本占比将大幅增加
随着汽车电动化,智能化不断升级以及软件生态逐渐繁荣,汽车软件开发需求出现爆发式增长,整车软件成本占比会随之大幅增长。
都想通过软件最大限度挖掘汽车全生命周期的价值。
Autosar os的栈使用是单一栈策略。
OS一般来说会考虑内存保护,时间保护,服务保护等
内存保护,必须要求硬件支持MPU这样基于硬件的内存保护功能。 内存保护基于可执行程序的data code stack保护。
在软件架构设计时,为了保证CPU的负载率以及任务的前置条件,需要将每个SWC的Runnable进行定义.
RTA-OS是一个静态可配置,先发制人的实时操作系统用于高性能、资源受限的应用程序。















 693
693











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









