







原视频:https://www.youtube.com/playlist?list=PLzRzqTjuGIDhiXsP0hN3qBxAZ6lkVfGDI
Bili:Houdini最强VEX算法教程 - VEX for Algorithmic Design_哔哩哔哩_bilibili
Houdini版本:19.5
1、什么是解算器
Houdini的解算器的作用是计算物体(刚体、线缆、布料表面、流体等)的模拟行为。
下面是来自用户@qq_39239990的理解,
解算器是基于帧的反馈处理,将当前帧的结果用于下一帧计算,以此循环,
解算器节点,双击节点后如下所示,节点第一个输入将用于解算的初始值,
因此解算器的结果不能连接新求解器的第一个输入,可连其它输入,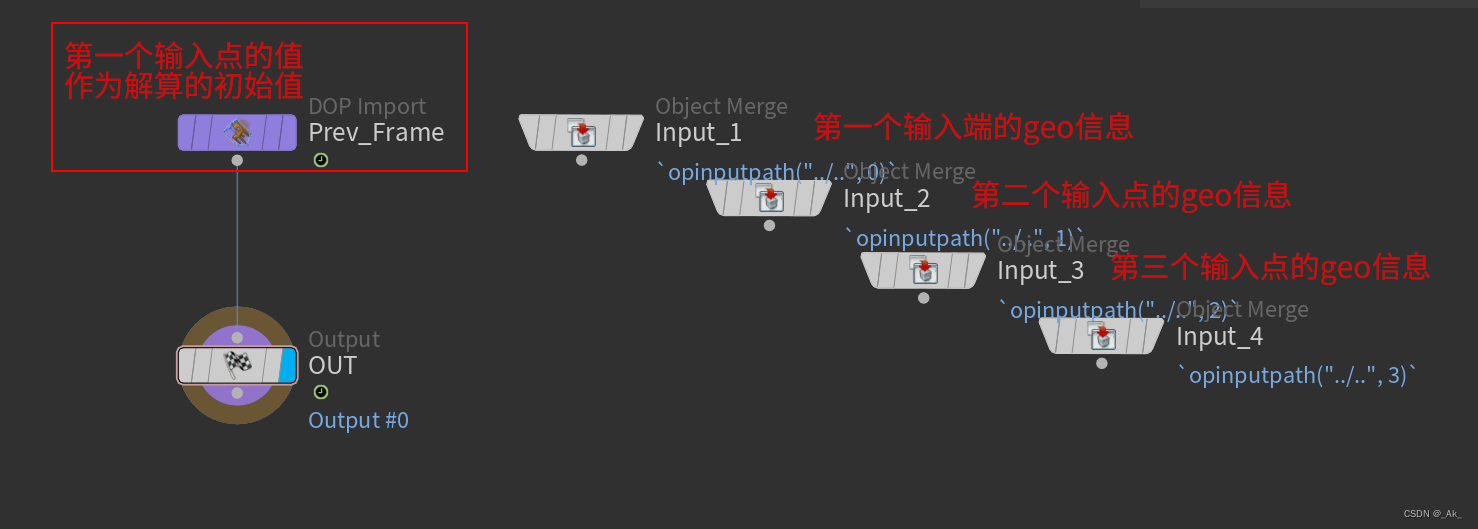
eg.下面用解算器对点进行移动。
①如下图创建节点,其中的圆circle节点方向设置为X-Z平面或随意,
②在类型为Points的move节点写入代码:@P.y += 0.01;
③结果:图略,点击播放按钮,点将向Y轴移动。
2、基础变换
用解算器对点进行旋转与位移,
eg.①继续使用【1、什么是解算器】的案例,
②代码节点move内代码修改为,
@P.y += 0.01;
matrix mat = ident();
rotate(mat, radians(3), set(0, 1, 0));
@P *= mat;③结果:点旋转向上位移,也可以加个“Trail”节点,看看运动轨迹。
3、Basci Growth
例子很简单,随时间变长的螺旋线。简单介绍与组Group节点的结合使用。
eg.①按下图添加节点,及进行设置,及写入代码,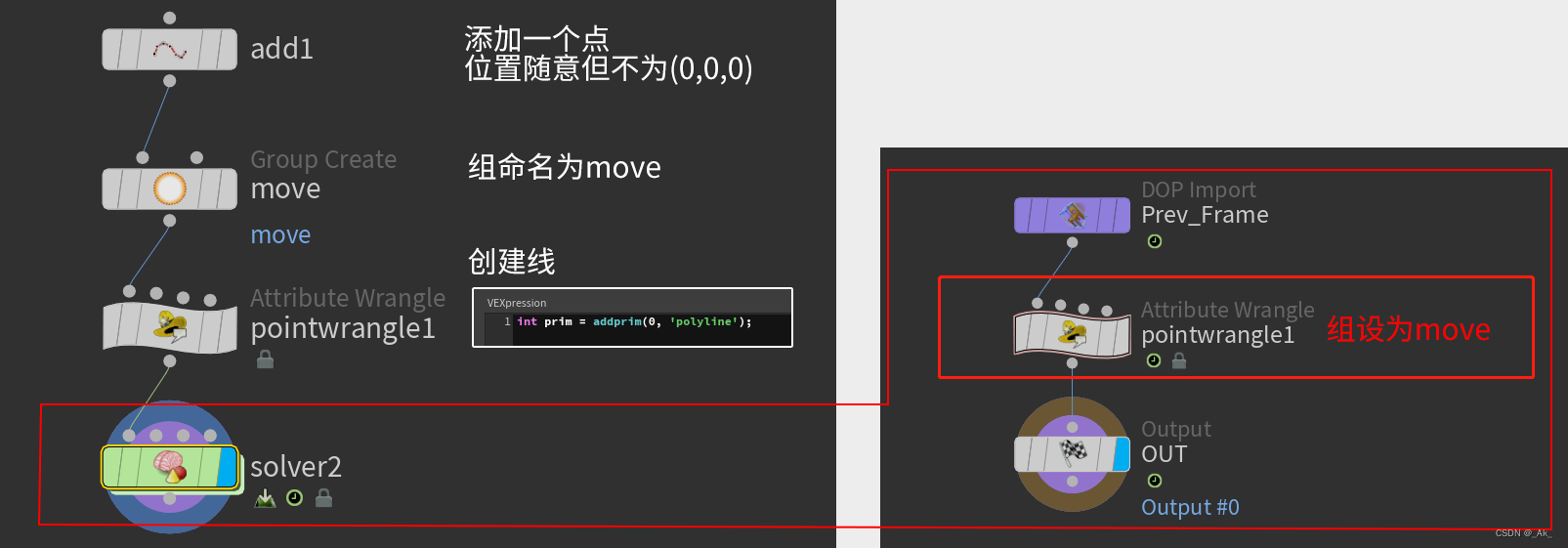
②解算器内的PointWrangle节点代码为,
int npt = addpoint(0, @P); //当前点位置创建点
addvertex(0, 0, npt); //将点添加到折线
@P.y += 0.05; //点位移
matrix mat = ident();
rotate(mat, radians(10), set(0, 1, 0)); //点旋转
@P *= mat;③结果:点击播放按钮,随时间推移,一条逐渐变成的螺旋线,大概是像下面这个样子(横排版),
4、对象上的矢量流动
本次做一个基于物体表面的矢量流动。大概像下面这个样子,
理论:
①把垂直的法线旋转,使法线与模型表面对齐,(下图可结合后面的代码进行理解),
②把对齐与表面的法线复制到【由模型生成的Scatter(点)】,
③在解算器里面对Scatter(点)进行移动等操作,
④设置颜色及对Scatter(点)生成线,方便观察。
操作:
①完整节点及设置如下,完整代码稍后奉上,
②Solver解算器内节点及设置如下,
③完整代码如下,
//filed节点
vector pos = @P * chf('scale');
//根据猪头上的点
vector dir = curlnoise2d(pos + @Time * chf('time')); //生成的矢量都位于X-Y平面上
matrix3 mat = dihedral(set(0,0,1), @N); //Z轴到法线的旋转矩阵
dir *= mat; //位于X-Y平面上的矢量进行旋转
v@N = dir; //旋转后,法线与猪头表面对齐//rand_life节点
//给点设置一个随机值,用作生命周期
i@life = floor(rand(@P + chf('seed')) * chi('maxlife'));//move节点
@P += @N * chf('speed'); //法线方向作为移动方向
i@life--;
//点生命值为0时,移除点,同时又随机生成点
if(i@life < 0){
vector ruv = rand(@P);
vector pos = uvsample(1, 'P', 'uv', ruv);
int pt = addpoint(0, pos);
int life = floor(rand(@P + chf('seed')) * chi('maxlife'));
setpointattrib(0, 'life', pt, life);
removepoint(0, @ptnum);
}//ncount节点
//当前点附近一定距离内的点,对其上色,即按密度区分上色
int npts[] = nearpoints(0, @P, chf('dist'));
i@count = len(npts);//flow_line节点
int pt = addpoint(0, @P - @N * chf('len'));
int line = addprim(0, 'polyline', @ptnum, pt);
setpointattrib(0, 'Cd', pt, v@Cd);5、体积上的矢量流动
本次案例跟上一节差不多,只不过对象是Volume。结果大概如下,
eg.①完整节点及设置如下,完整代码稍后奉上,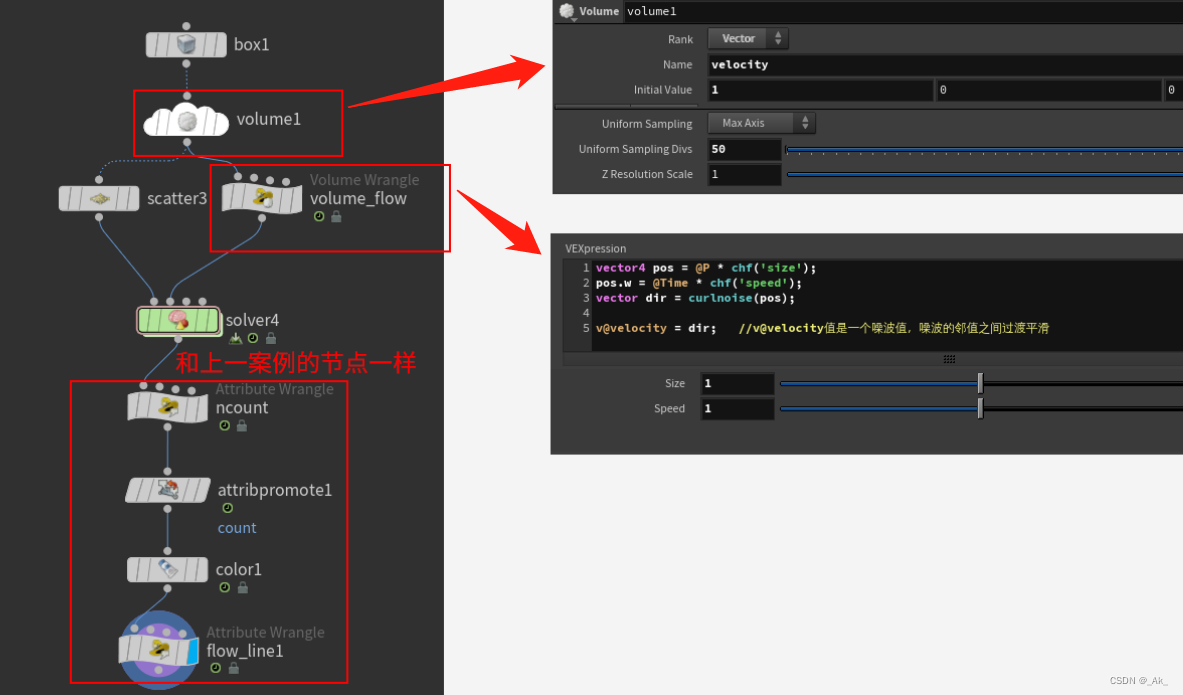
② Solver解算器内节点及设置如下,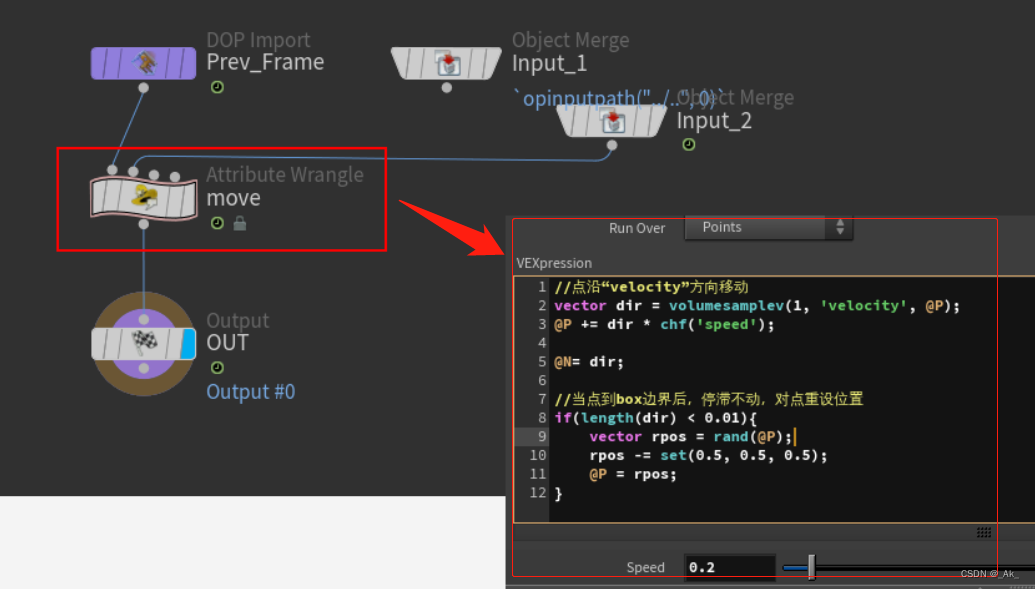
③完整代码如下,
//volume_flow节点,对体素设置随机向量
vector4 pos = @P * chf('size');
pos.w = @Time * chf('speed');
vector dir = curlnoise(pos);
v@velocity = dir; //v@velocity值是一个噪波值,噪波的邻值之间过渡平滑//move 节点
//点沿“velocity”方向移动
vector dir = volumesamplev(1, 'velocity', @P);
@P += dir * chf('speed');
@N= dir;
//当点到box边界后,停滞不动,对点重设位置
if(length(dir) < 0.01){
vector rpos = rand(@P);
rpos -= set(0.5, 0.5, 0.5);
@P = rpos;
}6、几何体修改
在小球表面做“雕刻”。打该结果如下,
主要是使用了sample_sphere_uniform(vector)函数 ,
该函数随机生成一个长度0~1的向量。拓展:参数X、Y可控制旋转,Z控制长度(0~1)。
eg.①完整节点及设置如下,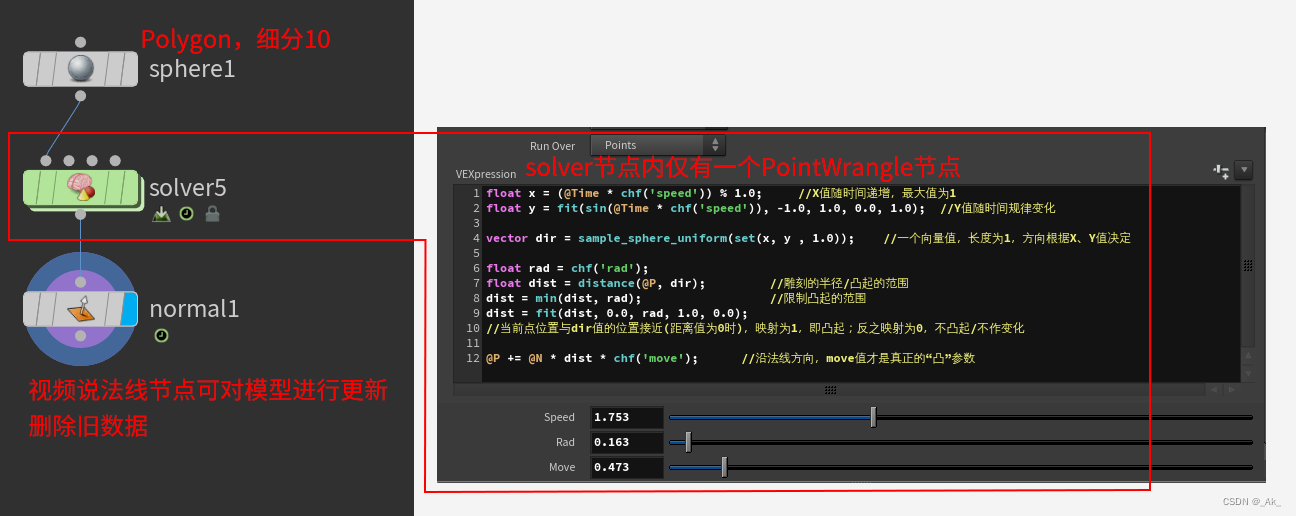
②solver解算器内的PointWrangle节点代码如下,
float x = (@Time * chf('speed')) % 1.0; //X值随时间递增,最大值为1
float y = fit(sin(@Time * chf('speed')), -1.0, 1.0, 0.0, 1.0); //Y值随时间规律变化
vector dir = sample_sphere_uniform(set(x, y , 1.0)); //一个向量值,长度为1,方向根据X、Y值决定
float rad = chf('rad');
float dist = distance(@P, dir); //雕刻的半径/凸起的范围
dist = min(dist, rad); //限制凸起的范围
dist = fit(dist, 0.0, rad, 1.0, 0.0);
//当前点位置与dir值的位置接近(距离值为0时),映射为1,即凸起;反之映射为0,不凸起/不作变化
//处于区间的值,按比例凸起
@P += @N * dist * chf('move'); //沿法线方向,move值才是真正的“凸”参数7、分形基础
老规矩,先上结果,(也可以用递归。最后一节讲讲),
eg.①完整节点及设置如下,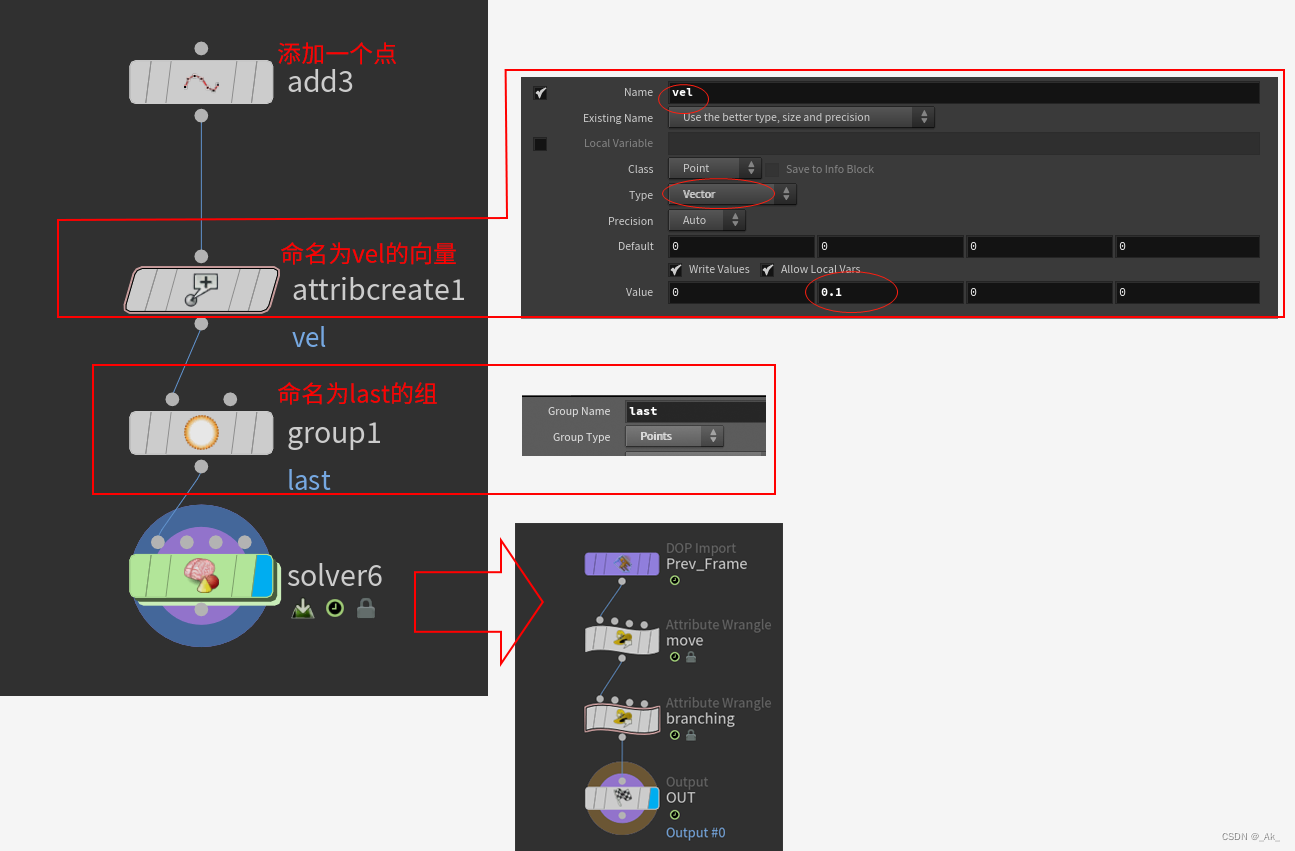
②solver解算器节点内的两个{PointWrangle节点代码为,
// move节点
vector pos = @P + v@vel; //vel已设置值(0,0.1,0)
int pt = addpoint(0, pos);
int line = addprim(0, 'polyline', @ptnum, pt);
setpointgroup(0, 'last', @ptnum, 0); //当前点被组last开除
setpointgroup(0, 'last', pt, 1); //新的点添加到组last
setpointattrib(0, 'vel', pt, v@vel);// branch节点
if(@Frame % chi('frame') == 0){
for(int i=-1; i<=1; i+=2){ //每个点分裂为两个点,两个不同方向
matrix mat = ident();
rotate(mat, chf('ang') * $PI * i, set(cos(@Time),0,sin(@Time)));
vector vel = v@vel * mat;
int pt = addpoint(0, @P + vel);
int line = addprim(0, 'polyline', @ptnum, pt);
setpointgroup(0, 'last', pt, 1); //新的点添加到组last
setpointattrib(0, 'vel', pt, vel);
}
setpointgroup(0, 'last', @ptnum, 0); //当前点被组last开除
}8、链式解算器
这次做一个小球在盒子里面弹来弹去的嵌套案例,
1)半透明的球在box内弹来弹去,检测中心点是否超出边界
2)小球们在半透明的球里面弹来弹去,检测整个小球(点+球半径)是否超出边界
主要用下面的方法判断小球是否在盒子box内:
①利用小球在box面上的投影(点积值>0,在盒子内);
②或者使用xyzdist()函数(查找从点到曲面几何图形上最近位置的距离)。
(也可以使用minpos()函数判断)
③对碰到边界的点,进行反弹,原理如下,(看不懂这个旋转的,回去看四元数及矩阵部分),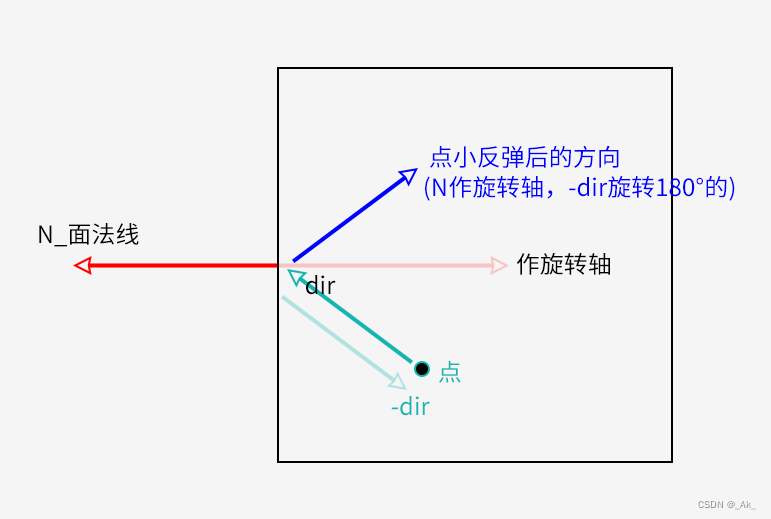
//使用四元数旋转
velocity *= -1;
vector4 quat = quaternion($PI,@N);
qrotate(quat,velocity);
//使用矩阵旋转
velocity *= -1;
matrix mat = ident();
roatate(mat,$PI,@N);
velocity *= mat;
//与水平面碰撞,仅需将速度的Y值取反值即可
velocity.y *= -1.0;
eg.①总体节点如下,设置并无特别需要注意的地方,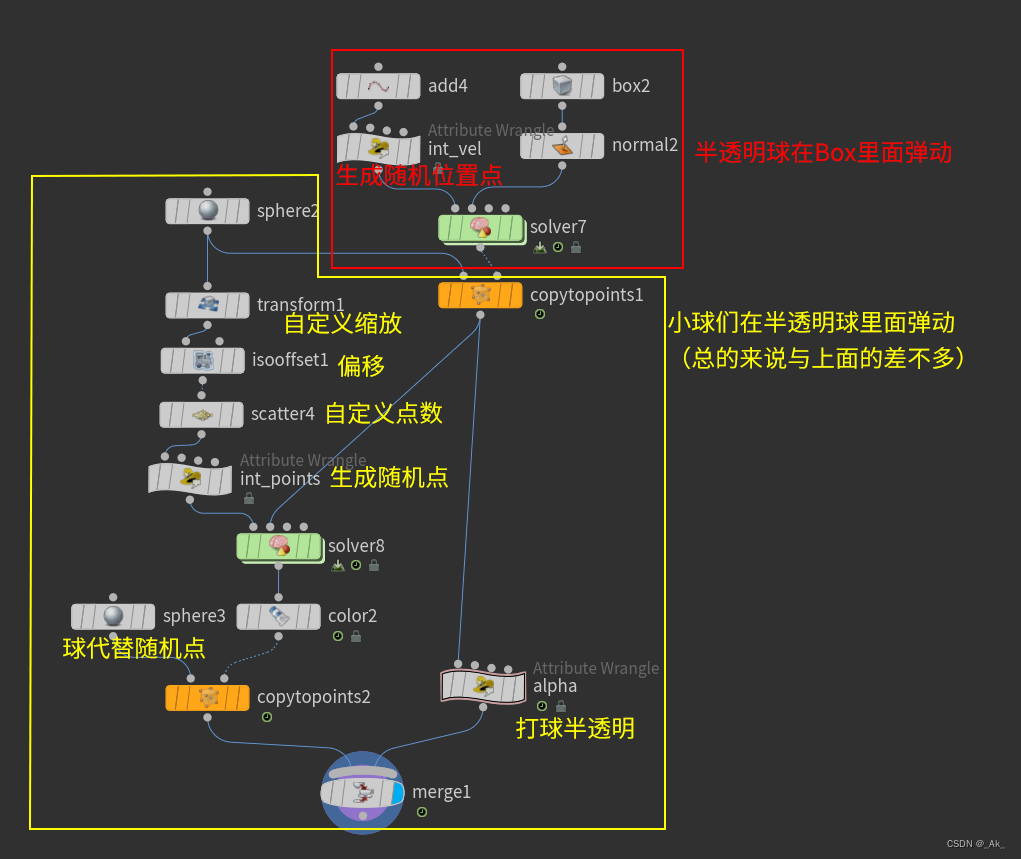
②两个解算节点内节点如下 ,
③各节点完整代码如下,( primuv函数不理解可以看最后的解释),
//int_vel节点,生成一个随机位置的点
vector vel = rand(chf('seed')); //值介于0~1之间
vel -= set(0.5, 0.5, 0.5); //让点集中在中心点附近
v@N = normalize(vel) * chf('speed'); //vel值作为法线方向//refelct1节点,单个点在box内反弹,利用点积判断其是否在box内
@P += @N;
int prim;
vector uv;
float dist = xyzdist(1, @P, prim, uv); //【当前点】距离box的最近面及最近点的uv坐标
vector norm = primuv(1, 'N', prim, uv); //最近面的法线
vector pos = primuv(1, 'P', prim, uv); //最近点的位置
vector dir = normalize(pos - @P); //box面上最近点位置 到 点位置 的差值为方向
//根据方向dir值在最近面的投影判断(点积),点是否在box内
//接触到box的面,改变点的运动方向(N),让它继续在box内继续弹来弹去
if(dot(dir, norm) < 0){
v@N = -v@N; //点/小球法线取反值
matrix mat = ident();
rotate(mat, $PI, norm); //旋转矩阵 面的法线N做旋转轴,旋转180°
v@N *= mat; //点的负法线方向旋转180°
@P = pos + v@N;
}
//int_points,对这些点们生成随机运动方向+自定义运动速度值
vector vel = rand(@P + chf('seed'));
vel -= set(0.5, 0.5, 0.5);
v@N = normalize(vel) * chf('speed');
f@pscale = chf('rad'); //自定义小球半径
f@col = rand(@P) * 1000;//refelct节点,球与球之间的碰撞反弹
@P += @N; //小球沿法线移动
//距离当前点位置最近的两个点,索搜索距离为小球直径,第一个最近点为当前小球
int npts[] = nearpoints(0, @P, f@pscale * 2.0, 2);
if(len(npts) == 2){ //两球发生接触,反弹回去
int npt = npts[1];
vector npos = point(0, 'P', npt);
//不懂可以结合前面的原理图去理解
vector dir = normalize(npos - @P);
matrix mat = ident();
rotate(mat, $PI, dir);
v@N = -v@N * mat; //这个法线为反弹后的方向/向量
@P = npos - dir * f@pscale * 2.0 + v@N; //小球位置更新
f@col = rand(@P + chf('seed')) * 1000; //碰后换色
}//move节点,与上面的代码类似,这次是判断运动的小球(+半径)是否在box内
@P += @N;
int prim;
vector uv;
float dist = xyzdist(1, @P, prim, uv); //【当前点】距离box的最近面及最近点的uv坐标
vector norm = primuv(1, 'N', prim, uv); //最近面的法线
vector pos = primuv(1, 'P', prim, uv); //最近点的位置
vector ppos = @P + normalize(pos-@P) * f@pscale; //引入半径
vector dir = normalize(pos - ppos); //box面上最近点位置 到 点位置 的差值为方向
//根据方向dir值在最近面的投影判断(点积),点是否在box内
if(dot(dir, norm) < 0){
v@N = -v@N; //点/小球法线取反值
matrix mat = ident();
rotate(mat, $PI, norm); //旋转矩阵 面的法线N做旋转轴,旋转180°
v@N *= mat; //点的负法线方向旋转180°
@P = pos + dir * f@pscale + v@N;
}
//Alpha节点,对大球设置透明度
f@Alpha = 0.2;④结果:
颜色color 节点记得选择col属性,其它自定义参数看着调。
9、拓展—primuv函数、xyzdist函数
primuv 是根据给出的uv 坐标 和 面序号,读取任意属性,和这个函数类似的是uvsample()函数.
详细可以看这篇文章知乎@刘鹏云。















 2834
2834











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









