







前言
前段时间看到一篇博客,利用开源的飞控,自己DIY的四轴飞行器,内心就开始躁动,想自己也DIY一架四轴飞行器。本系列博客,记录业余时间DIY的过程,个人能力有限,中间肯定会遇到很多困难,希望能坚持下去。也希望有共同兴趣爱好的同学加入,相互帮助,共同进步。因为是工作之余做的项目,所以进度会比较慢。我创建了一个微信学习讨论群,扫描文章末尾的二维码添加微信,通过后拉入群。
本篇文章,先简单介绍一下四轴飞行器,以及我们这个项目实现的目标。
一、四轴飞行器简介
按照飞行平台结构分类,我们通常把飞行器分为3类:固定翼、直升机、多旋翼。
固定翼飞行器:就是“翅膀”形状固定、靠流过机翼的风提供升力的飞行器。大家平常所见的客机,如波音747、空客A380等都是固定翼飞机。

直升机:是一种由一个或多个水平旋转的旋翼提供上升力和推进力而进行飞行的航空器。

多旋翼飞行器:是指3个或者更多旋翼的直升机,能够垂直起降。

四轴飞行器,又称四旋翼飞行器。它是多旋翼飞行器中的一种,也是最流行的一种无人机。


二、四轴飞行器的工作原理
参考文章 四旋翼飞行器结构和原理
四旋翼飞行器通过调节四个电机转速来改变旋翼转速,实现升力的变化,从而控制飞行器的姿态和位置。四旋翼飞行器是一种六自由度的垂直升降机,但只有四个输入力,同时却有六个状态输出,所以它又是一种欠驱动系统。
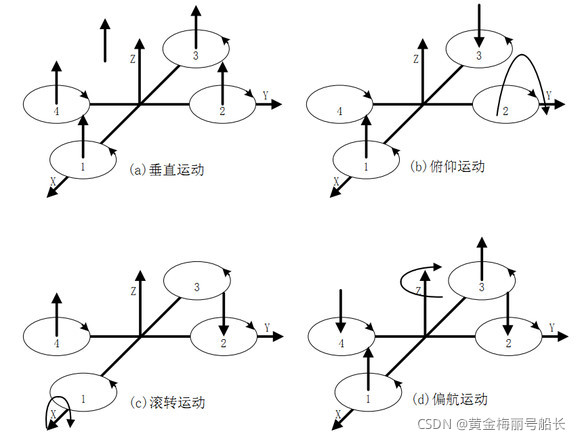
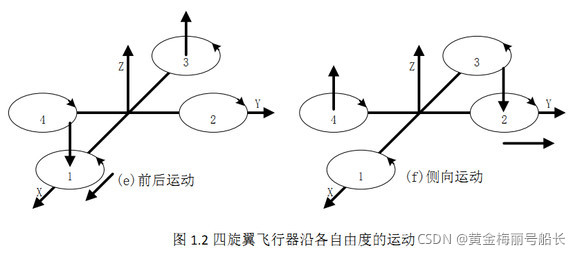
从上图提供的6中运动姿态中可以看出,通过控制电机的转速和方向,可以实现6个自由度的运动。
三、项目目标
基础:
1、做一个微型四轴飞行器,实现基本的飞行,以及遥控
进阶:
2、实现定高
3、无线图传
高阶:
4、按照规划的航线飞行
5、实现避障功能
四、方案
为学习四轴飞行器的基本原理,实现最基础的功能,以微型四轴飞行器做为我们入门的机型。
硬件框图如下图所示
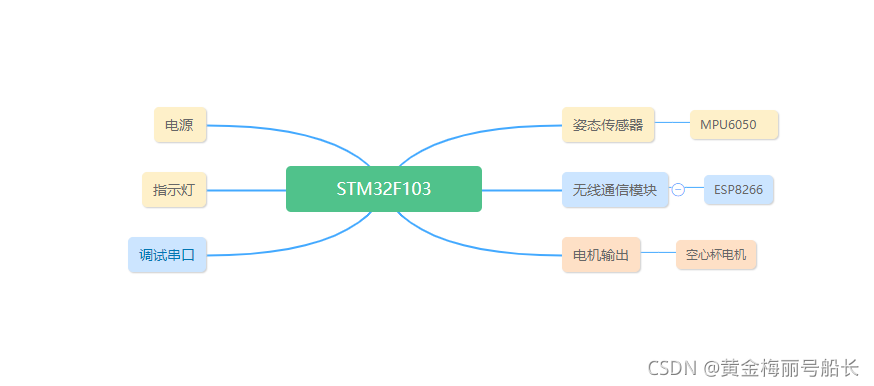
| 名称 | 型号 | 接口 |
| 主控 | STM32F103C8T6 | |
| 六轴加速度计 | MPU6050 | I2C |
| 无线通信模块 | 乐鑫 ESP8266模块 | UART |
| 电机 | 空心杯 | PWM |
| 电池 | 1S电池 |
五、总结
通过本章节,了解了四轴飞行器的基本原理以及硬件方案,后面我们就分步去实现每个功能模块。
不积跬步无以至千里,脚踏实地,仰望星空,加油!
欢迎小伙伴们加我微信,拉进讨论群,共同进步。


















 5683
5683

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









