






Zihua Zheng ;
Ni Nie Megvii ;Tencent
这篇文章,作者提出了一个基于PatchMatch方法的高分辨率光流估计方法。
可以以低内存占用率的状态下高精度的获取光流,引入PatchMatch就是为了对抗RAFT的4D All Paired Correlation Volume的高冗余计算。
下图就是4D All Paired Correlation Volume

进一步讲,为了进一步压缩计算量,作者优化了PatchMatch方法中的Propagation步骤,创造了inverse progation.
So 本文2个创新点,一个PatchMatch求解高精度光流,且提出优化的Inverse Propagation。
说了那么多,讲一下什么是PatchMatch,这里引用知乎Cat food 的内容加以解读解读PatchMatch: A Randomized Correspondence Algorithm for Structural Image Editing - 知乎
下图,PatchMatch 2009年由Barnes在ACM Trans Graph 发表。是一种Nearest Neighbor Matching 方法,为了计算局部相关性。
那么什么是局部相关性呢,看图内容,自己深入理解。
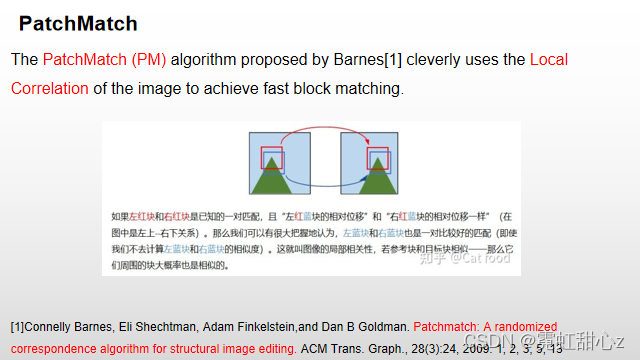
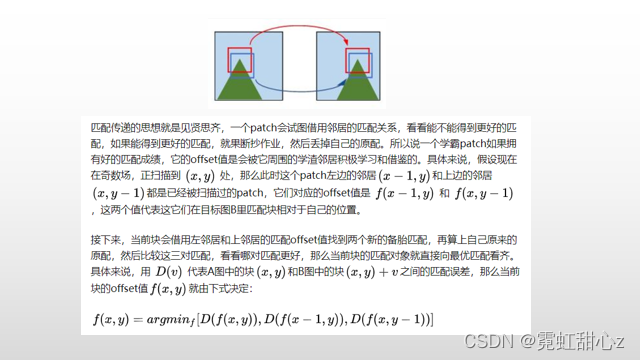
那么,按照这个思路,一旦一个Patch有了最佳匹配,那么它的最佳匹配关系就可以迅速传递给它的邻居,这样邻居就不用再去寻找匹配,直接抱大腿,这样就避免了大量的区块匹配计算。
在真正进入PatchMatch之前还需要了解一个重要定义:
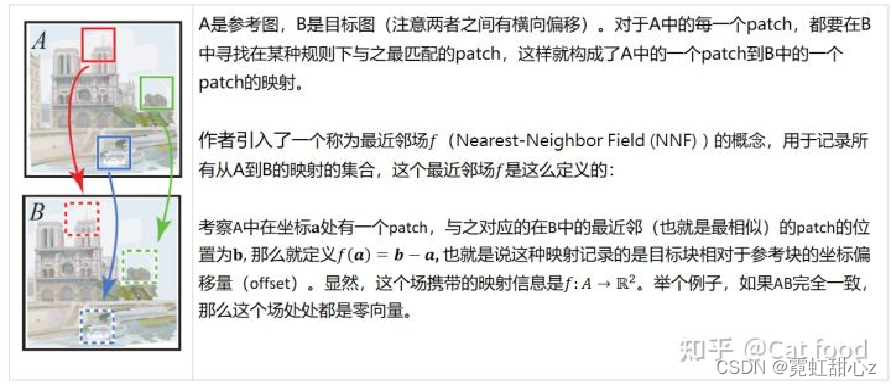
最近邻场f:它把A的Patch映射到B里的一种映射集合,是不是很熟悉,这不就是一个把Frame1 Warping to Frame2 的操作吗,那么最近邻场f 不就是光流图吗!!!继续往下看PatchMatch的主干内容。
Patchmatch implements a random initialization, iterative propagation and search algorithm for approximate nearest neighbor field estimation .
*橘色部分的Propagation 就是作者要优化的部分,也就是Inverse Propagation的提出。
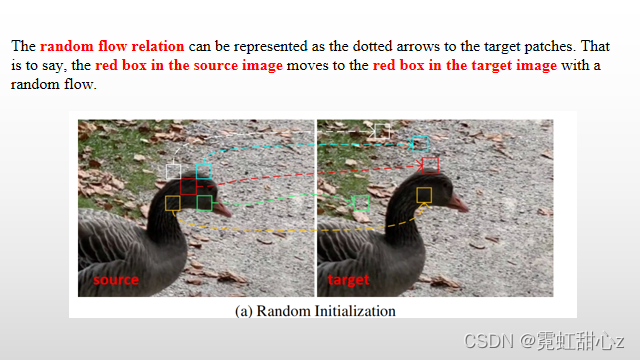
先看random initialization:
在PatchMatch中,最开始不知道A和B两幅图中那些Patch是匹配的,那么就有2种方法,一种随机给一个匹配图f,另外一个是给一些先验信息(较难)。在光流问题中,选择随机化匹配图(光流)f。就像GAN网络的随机噪声一样。
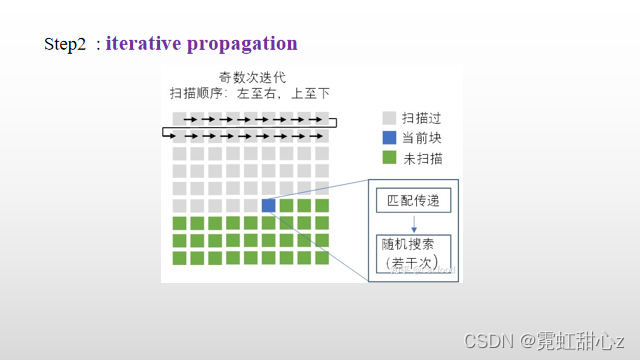
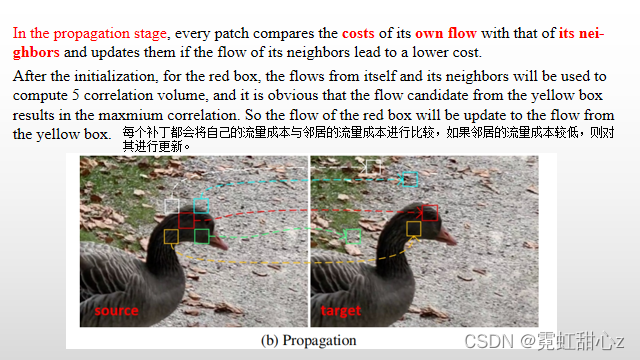
再看iterative propagation
下图表示的是一种迭代传播方式,当前块蓝色,需要从它的多个邻居和自己获得自己的f信息!看看那个f信息,把当前块蓝色Warping 之后 和它本来的相似性最高,就利用那个最相近的的f。
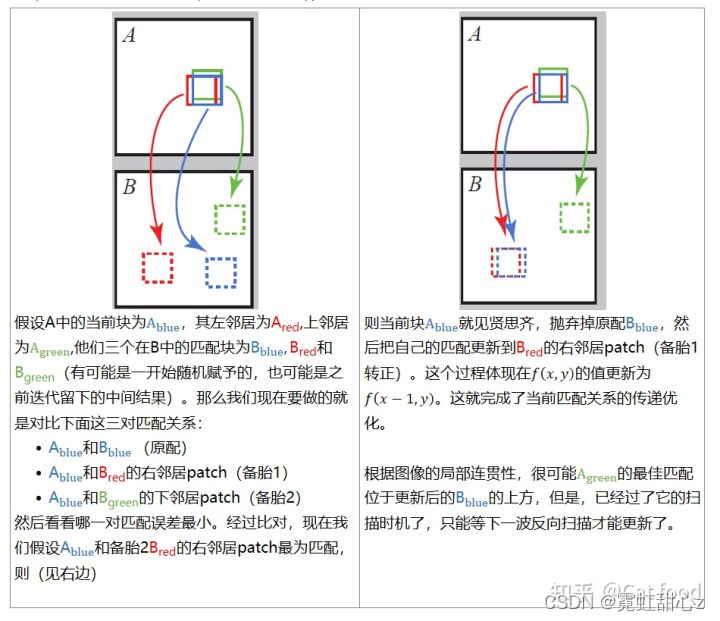
看了上面内容,大概对这个神奇的PatchMatch有一些了解了,那么把各种块的匹配关系换成光流的话,不就可以降低4D All Paired Correlation Volume的计算量了吗,有些块并不需要计算,只需要根据邻居的最匹配光流信息,把自己的光流更新一下就可以。
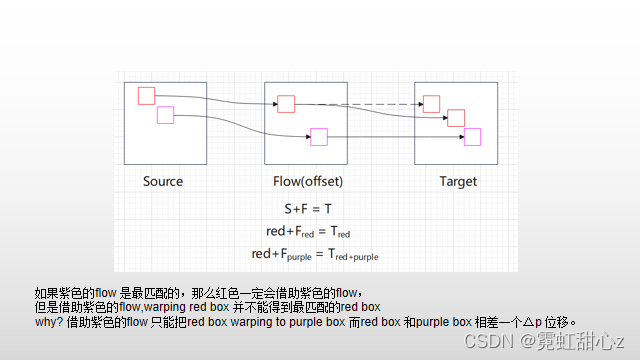
△p是啥呢,它就是当前Patch和邻居Patch的相对位置呀,如果邻居在右上,那么仅借助邻居的flow并不能把当前Patch匹配到它该到的位置,因为啥?因为有个△p的相对位移的差距呀,所以你要先进行一个△p的移动,再根据flow 进行 Warping,不就得到了,它自己的匹配位置吗!
search algorithm:
随机匹配太简单,不做介绍。
下面是神奇的PatchMatch的效果图。

说了那么多,也终于到了Patch in Optical Flow Problem (其实答案,我上面已经提到了,如何把PatchMatch 应用在optical flow 里)
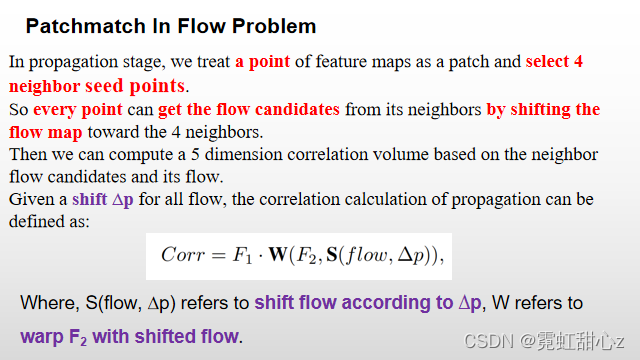
首先初始化把一个点作为一个Patch, 选它周围的4个点作为种子点,就是像素点。左上,右上,左下,右下。
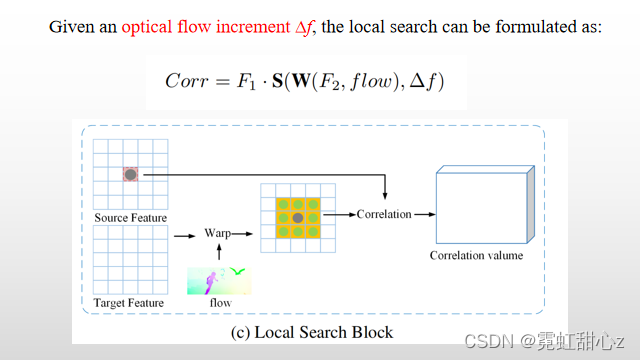
上图中的Corr 公式,就是把F2图像经过一个flow 和一个相对位移△p的转换,往F1上Warping ,来计算相关性,以此来更新flow。
那么正常的Propagtion 就是下图这样的做操作,利用initial flow的匹配关系,先进行一个相对位移△p的移动,然后进行Warping,最后进行C人relation Volume的计算。但是作者认为这样的计算太费劲了。
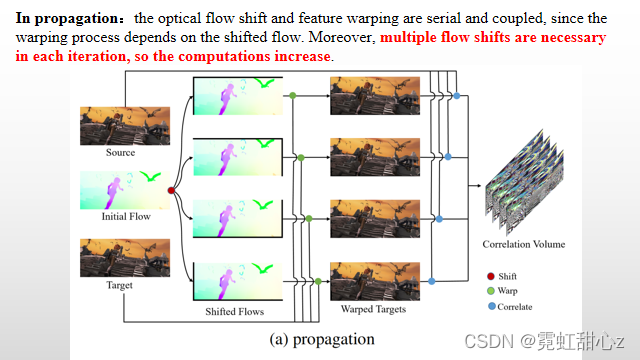
所以提出了Inverse Propagation.
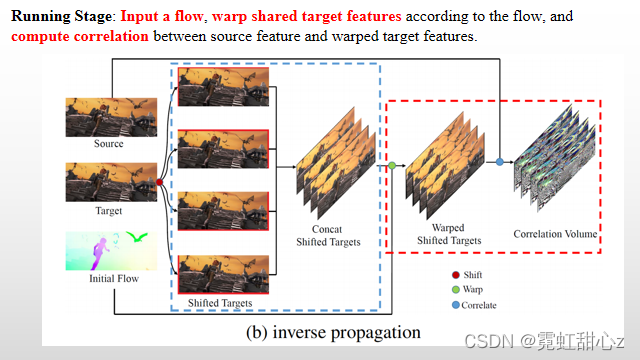
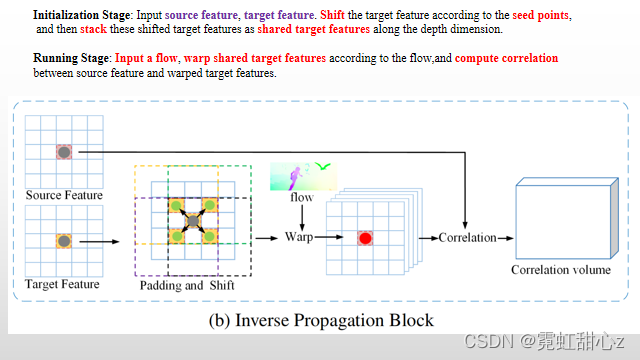
有2个步骤一个Initialization Stage 和 Running Stage. 作者先对图像进行一个相对位移△p的移动,然后把这4个图像进行一个堆叠,也就是论文中所说的Stack
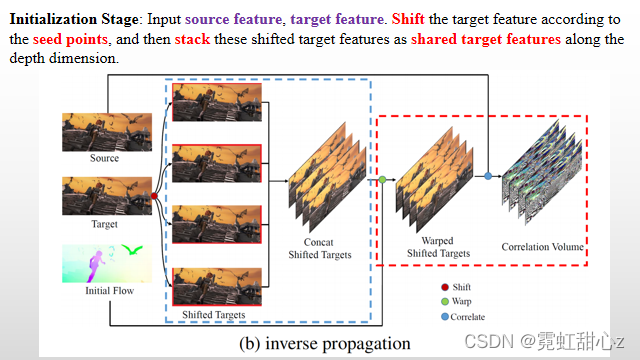
Running Stage:利用初始化的flow 把堆叠之后的图像进行一个Warping操作,得到一个堆叠之后的Correlation Volume,降低计算量。
在像素级的Propagation 是这样操作的。把像素点先进行相对位移△p的移动,然后再进行相应flow的翘曲。
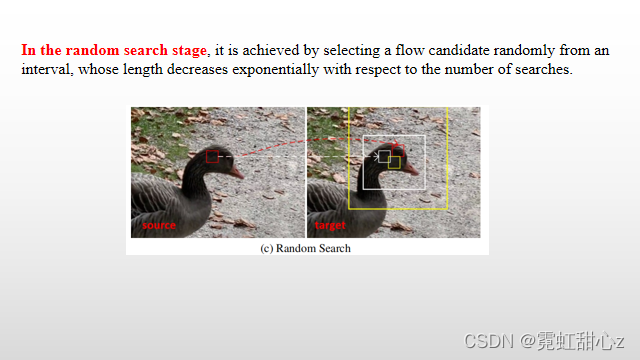
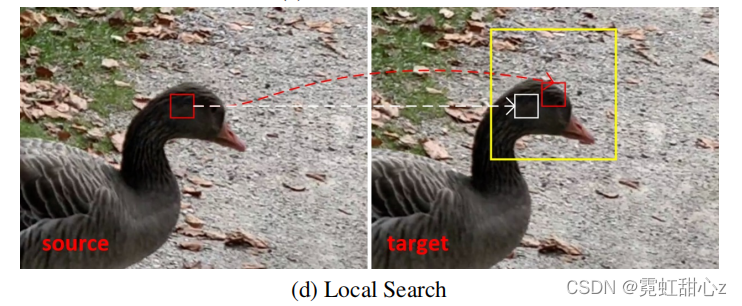
在补充材料里,也有关于鸭子的素材,贴一下。
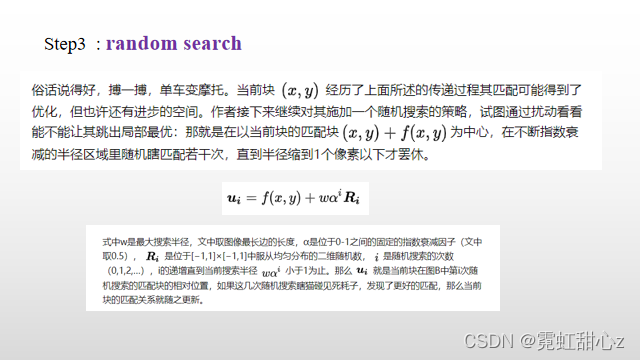
最后一部分就是Local Search :(简单,略)
It is difficult to obtain very accurate optical flow by patch propagation alone, since the range of randomly initialized flow values is very sparse.
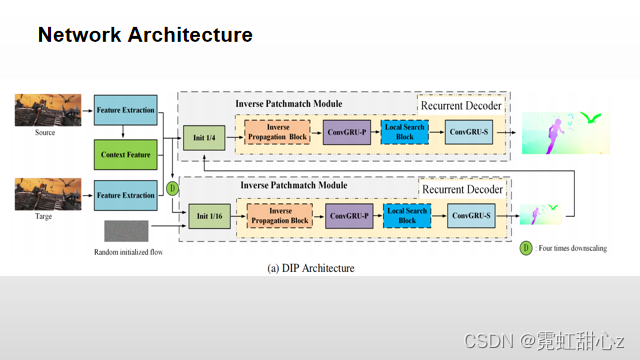
下图是算法结构,由于是高分辨率,所以作者做了一个不同尺度的更新迭代,以获得更精细的光流信息。
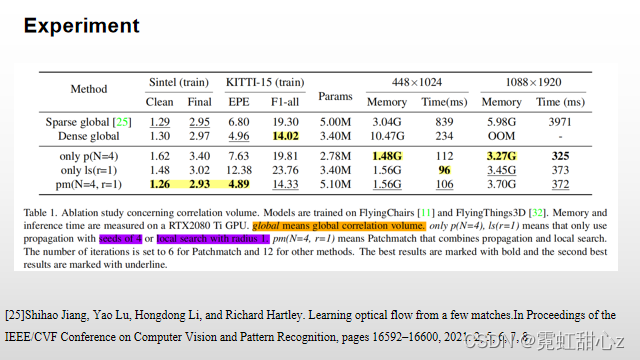
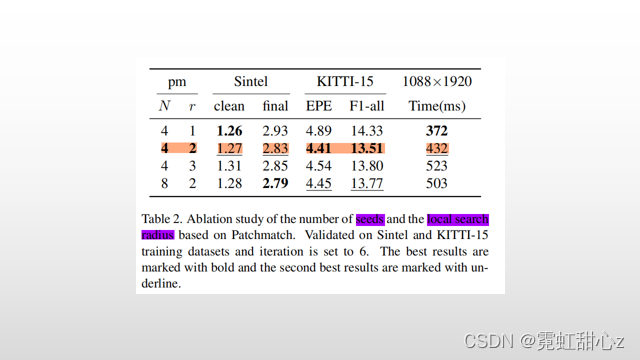
作者做了N(种子点数量) 和r(局部搜索范围半径) 的消融实验,结果显式4 2效果最好。
MEM是内存占用量吧。
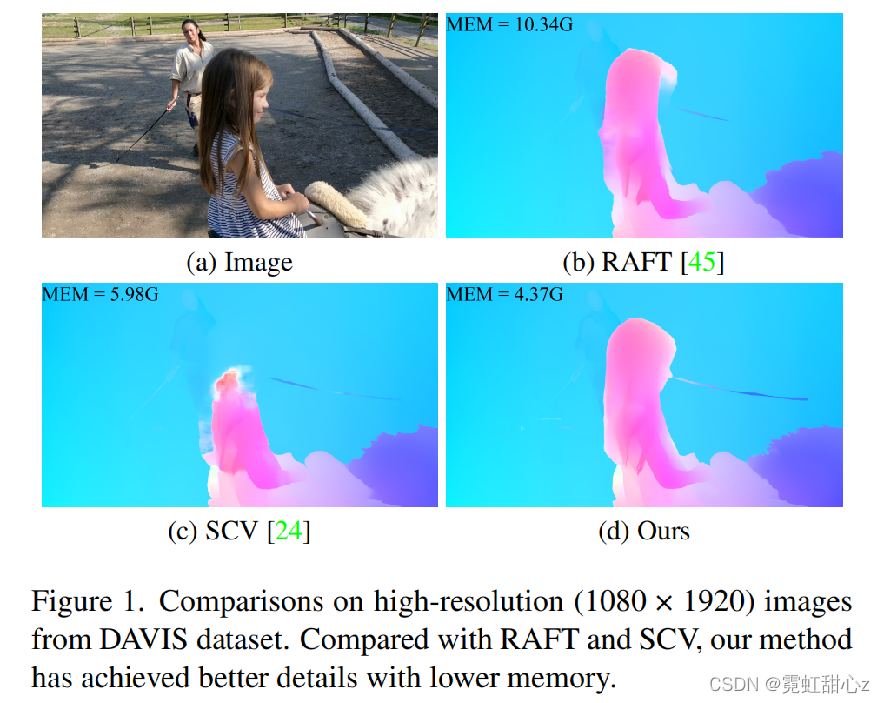
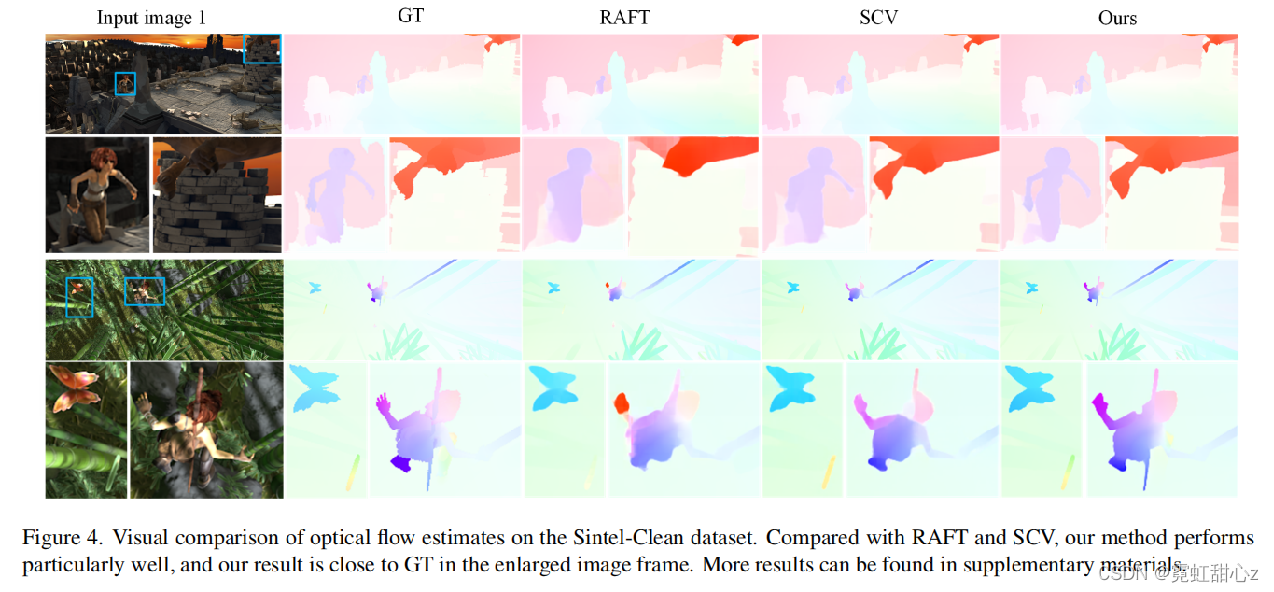
下面这几幅图真的是惊艳到了。


















 987
987











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









