






更多内容请点击上方 ABB机器人实战技巧 关注
也可点击公众号下方 往期经典 浏览更多内容
转载请先后台留言,大家一起支持原创,推动机器人使用和发展
本公众号对各类ABB机器人应用,仿真,毕业设计提供技术支持,详细后台留言
本公众号诚挚希望与各机器人培训机构,机器人使用单元合作,提供技术支持,详细后台留言
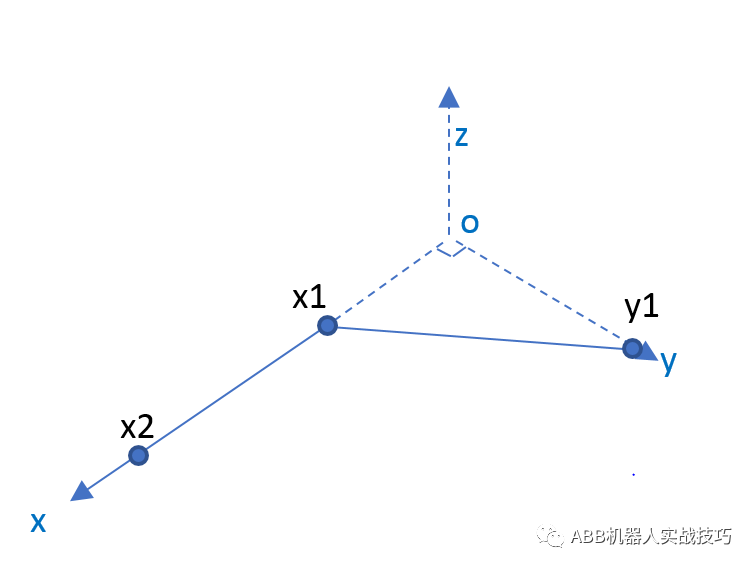
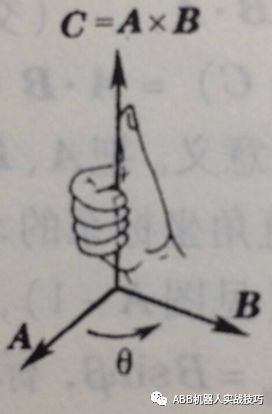
1. ABB机器人可以通过如上三点,确立坐标系原点,其中x1到x2构成x方向,y1点到x1x2连线的垂线为y方向,z方向满足右手法则,即z方向为x方向叉乘y方向得到。
2. 之前已经介绍过如何通过x1x2和y1三点坐标,计算原点o的坐标。
3. 本文介绍如何通过x1x2和y1三点,计算坐标系原点o的方向。结果输出为欧拉角。也可使用ABB机器人函数OrientZYX将欧拉角转
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 8330
8330











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









