






首先介绍一下客户端库
客户端库–提供ROS编程的库,和API的概念类似。
比如我们实现建立node,发布消息,调试服务这些功能,不需要从TCP层去实现,而是直接调用client Library就可以。
ROS提供的client library有:
roscpp
rospy
roslisp
......
一、roscpp
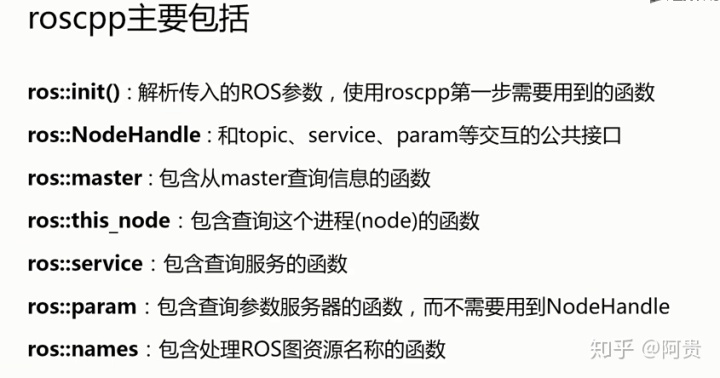

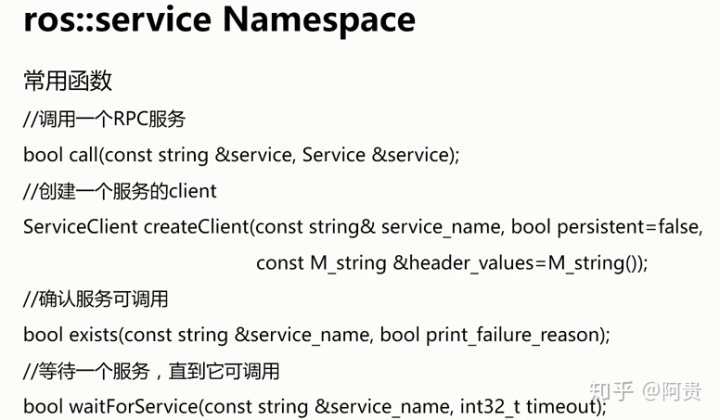
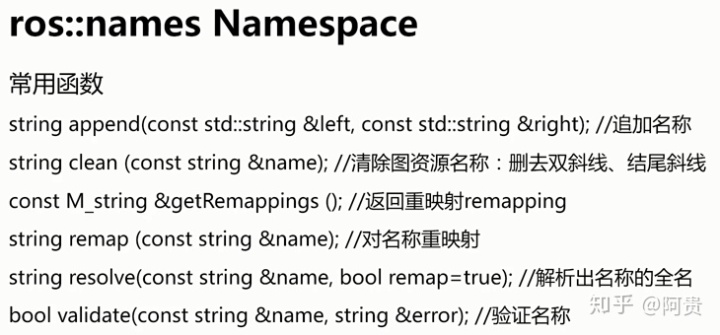
这里的master是一个命名空间,不是类,所以我们不需要创建对象,直接调用相关函数就可以。另外,这些函数用到的也不多。

首先介绍一下客户端库
客户端库–提供ROS编程的库,和API的概念类似。
比如我们实现建立node,发布消息,调试服务这些功能,不需要从TCP层去实现,而是直接调用client Library就可以。
ROS提供的client library有:
roscpp
rospy
roslisp
......
一、roscpp
这里的master是一个命名空间,不是类,所以我们不需要创建对象,直接调用相关函数就可以。另外,这些函数用到的也不多。
 493
1万+
493
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章





















