





本教程主要实践如何创建一个ROS工作空间和功能包实现基于ROS的信息发送和接收,同时用CLion如何去调试这个ROS工程。ROS允许多个工作空间并存,每个工作空间中创建需要的功能包,功能包创建于工作空间SRC目录下。
创建工作空间的主要命令
并且在工作空间下创建一个功能包实现发送信息和接收信息的功能。
catkin_make
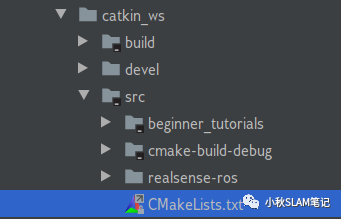
加入环境变量:source ./devel/setup.bash寻找启动CLion的脚本文件:locate clion.sh 启动CLion:sh PATH_TO_CLION/bin/clion.sh File->Open选择当ROS工作空间下面的CMakeLists.txt文件
File->Open选择当ROS工作空间下面的CMakeLists.txt文件
 以工程的形式打开选择 Open as Project
以工程的形式打开选择 Open as Project
 打开CLion的终端输入roscore
打开CLion的终端输入roscore
 启动 talker.cpp
启动 talker.cpp
 启动 listener.cpp
启动 listener.cpp
 视频教程
更多调试教程请参考下面文章Ubuntu16.04系统下安装和配置CLion编译器详细教程
视频教程
更多调试教程请参考下面文章Ubuntu16.04系统下安装和配置CLion编译器详细教程
Ubuntu16.04系统下用CLion编译器调试C++代码详细图文视频教程
catkin_init_workspacecatkin_init_workspace catkin_create_pkg beginner_tutorials std_msgs rospy roscpp并且在工作空间下创建一个功能包实现发送信息和接收信息的功能。
mkdir-p ~/catkin_ws/srccd ~/catkin_ws/srccatkin_init_workspacecatkin_create_pkg beginner_tutorials std_msgs rospy roscppcd ~/catkin_wscatkin_make source devel/setup.bashcd /catkin_ws/src/beginner_tutorials/src#include "ros/ros.h"#include "std_msgs/String.h"#include int main(int argc, char **argv){ ros::init(argc, argv, "talker"); ros::NodeHandle n; ros::Publisher chatter_pub = n.advertise<:string>("chatter", 1000); ros::Rate loop_rate(10); int count = 0; while (ros::ok()) { std_msgs::String msg; std::stringstream ss; ss << "xiao qiu slam bi ji " << count; msg.data = ss.str(); ROS_INFO("%s", msg.data.c_str()); chatter_pub.publish(msg); ros::spinOnce(); loop_rate.sleep(); ++count; } return 0;}#include "ros/ros.h"#include "std_msgs/String.h"void chatterCallback(const std_msgs::String::ConstPtr& msg){ ROS_INFO("I heard: [%s]", msg->data.c_str());}int main(int argc, char **argv){ ros::init(argc, argv, "listener"); ros::NodeHandle n; ros::Subscriber sub = n.subscribe("chatter", 1000, chatterCallback); ros::spin(); return 0;}cd /home/q/catkin_ws/src/beginner_tutorials
cmake_minimum_required(VERSION 3.0.2)project(beginner_tutorials)set( CMAKE_BUILD_TYPE debug )find_package(catkin REQUIRED COMPONENTS roscpp rospy std_msgs genmsg)generate_messages(DEPENDENCIES std_msgs)catkin_package()include_directories( include ${catkin_INCLUDE_DIRS} )add_executable(talker src/talker.cpp)target_link_libraries(talker ${catkin_LIBRARIES})add_dependencies(talker beginner_tutorials_generate_messages_cpp)add_executable(listener src/listener.cpp)target_link_libraries(listener ${catkin_LIBRARIES})add_dependencies(listener beginner_tutorials_generate_messages_cpp)重新编译一下cd ~/catkin_ws
catkin_make
加入环境变量:source ./devel/setup.bash寻找启动CLion的脚本文件:locate clion.sh 启动CLion:sh PATH_TO_CLION/bin/clion.sh
File->Open选择当ROS工作空间下面的CMakeLists.txt文件
以工程的形式打开选择 Open as Project
打开CLion的终端输入roscore
启动 talker.cpp
启动 listener.cpp
视频教程
更多调试教程请参考下面文章Ubuntu16.04系统下安装和配置CLion编译器详细教程
Ubuntu16.04系统下用CLion编译器调试C++代码详细图文视频教程
Ubuntu16.04系统的安装和使用教程汇总
如何制作一个U盘用来安装Ubuntu16.04 系统
Windows10 下安装 Ubuntu16.04 双系统教程
这个Ubuntu系统使用教程让小白的你瞬间变为大神
Cmake编译源码教程汇总
源代码是如何变成可执行程序的 ?(一)
源代码是如何变成可执行程序的 ?(二)
源代码是如何变成可执行程序的 ?(三)
源代码是如何变成可执行程序的 ?(四)
源代码是如何变成可执行程序的 ?(五)
源代码是如何变成可执行程序的 ?(六)
GDB调试程序教程
GDB调试源码以及核心已转存错误借助core_dump文件解决
有任何问题可以添加下面微信,加入微信群大家一起交流学习!
同时29号有抽奖活动,会从留言和赞赏用户中抽取三名幸运读者!
奖品有视觉SLAM十四讲第二版、CSDN付费专栏、红包等!

















 607
607











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









