






原标题:Windows下PCL安装编译过程
一、概述
PCL(PointCloud Library)是在吸收前人点云相关研究基础上建立起来的大型跨平台开源C++编程库,它实现了大量点云相关的通用算法和高效数据结构,涉及点云获取、滤波、分割、配准、检索、特征提取、识别、追踪、曲面重建、可视化等,支持多种操作系统平台,可在Windows、 Linux、 Android、 Mac OS X、 部分嵌入式实时系统上运行。近年来,随着消费级点云数据获取设备与基于图像的三维重建方案的成熟,点云处理在各个行业中得到了广泛的使用,尤其体现在机器人领域、CAD/CAM逆向工程、激光遥感测量、虚拟现实、人机交互。
二、内容结构
对于3D点云处理来说,PCL完全是一个模块化的现代C++模板库。其基于以下第三方库:Boost、 Eigen、 FLANN、 VTK、 CUDA、 OpenNI、 QHull。 PCL架构图如图1所示。
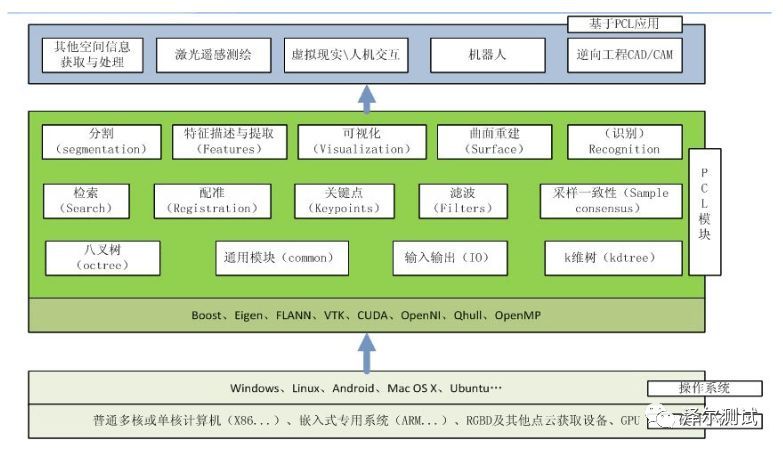
图1 PCL架构
PCL利用OpenMP、GPU、CUDA等先进高性能计算技术,通过并行化提高程序实时性。K近邻搜索操作的构架是基于FLANN实现,所有模块和算法都是通过Boost共享指针来传送数据,避免了多次复制系统中已存在的数据的需要。PCL纳入了多种操作点云数据的三维处理算法,包括过滤、特征估计、表面重建、模型拟合和分割、定位搜索等。每一套算法都是通过基类进行划分的,试图把贯穿整个流水线处理技术的所有常见功能整合在一起,从而保持了整个算法实现过程中的紧凑和结构清晰,提高代码的重用性、简洁可读。在PCL中一个处理管道的基本接口程序如下:
(1)创建处理对象:例如过滤、特征估计、分割等。
(2)使用setInputCloud通过输入点云数据,处理模块。
(3)设置算法相关参数。
(4)调用计算(或过滤、分割等)得到输出。
为了进一步简化和开发,PCL被分成了一系列较小的代码库,使其模块化,以便能够单独编译使用提高可配置性,特别适用于嵌入式处理中:
(1) libpcl filters:如采样、去除离群点、特征提取、拟合估计等数据实现过滤器。
(2) libpcl features:实现多种三维特征,如曲面法线、曲率、边界点估计、矩不变量、主曲率,PFH和FPFH特征,旋转图像、积分图像,NARF描述子,RIFT,相对标准偏差,数据强度的筛选等。
(3) libpcl I/O:实现数据的输入和输出操作,例如点云数据文件(PCD)的读/写。(4) libpcl segmentation:实现聚类提取,如通过采样一致性方法对一系列参数模型(如平面、柱面、球面、直线等)进行模型拟合点云分割提取,提取多边形棱镜内部点云等。
(5) libpcl surface:实现表面重建技术,如网格重建、凸包重建、移动最小二乘法平滑等。
(6) libpcl register:实现点云配准方法,如ICP等。
(7) libpclkeypoints:实现不同的关键点提取方法,可用来作为预处理步骤,决定在哪儿提取特征描述符。
(8)libpcl range:实现支持不同点云数据集生成的范围图像。
三、Windows下配置安装PCL开发环境
PCL及其第三方库的安装、编译有两种方法:
1、预编译版本的下载安装:
(1)在Windows上使用All-in-one installers,必须首先安装Microsoft VisualStudio 2010或者Visual Studio 2008。
(2)从PCL官网 (http://www.pointclouds.org/downloads/windows.html)下载和Microsoft Visual Studio版本一致的All-in-oneinstallers。
(3)从官网下载的All-in-one installers中已经包含了相应的第三方库。
(4)直接双击安装即可。
(5)由于All-in-one installers提供的PCL库的版本较低,因此很多新添加的功能无法使用。
2、从源码进行安装、编译:
(1)在PCL官网 (http://www.pointclouds.org/downloads/windows.html)下载与Microsoft Visual Studio版本一致的第三方库的安装文件。
(2)PCL库只有Boost、 Eigen、 Flann、 VTK这四个库是必须的,所以可以只下载安装这四个库。按照正常安装软件的步骤分别安装这些库。第三方库版本需求如图2所示:
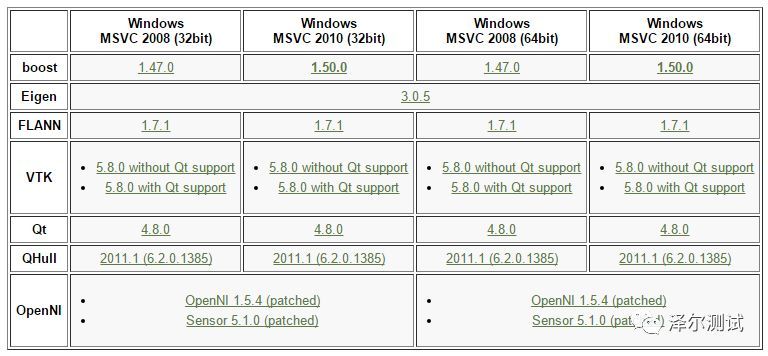
图2第三方库版本
(3)下载安装CMake (http://www.cmake.org/cmake/resources/software.html)。
(4)下载PCL源码库 (https://github.com/PointCloudLibrary/pcl/releases)。
(5)运行CMake,选择源码路径和编译路径,并勾选“Grouped”和”Advanced”复选框对变量进行分类,单击”Config”按钮进行配置。如图3所示。

图3编译路径配置
(6)单击”Config”,然后选择项目的生成器,编译器选择默认即可,如图4所示。
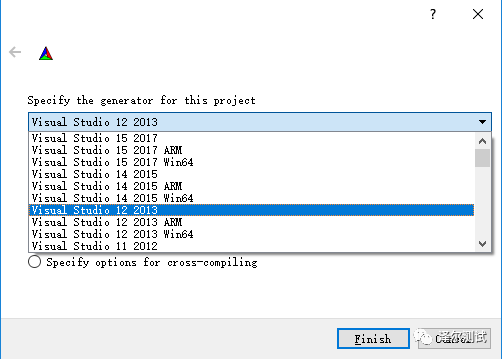
图4配置项目编译选项
(7)第一次生成项目文件时,会遇到一些第三方库的路径配置问题,图5所示是第三方库Eigen路径未搜索到,按照图6所示配置路径再编译,同样如此去配置FLANN、Boost、VTK等路径。
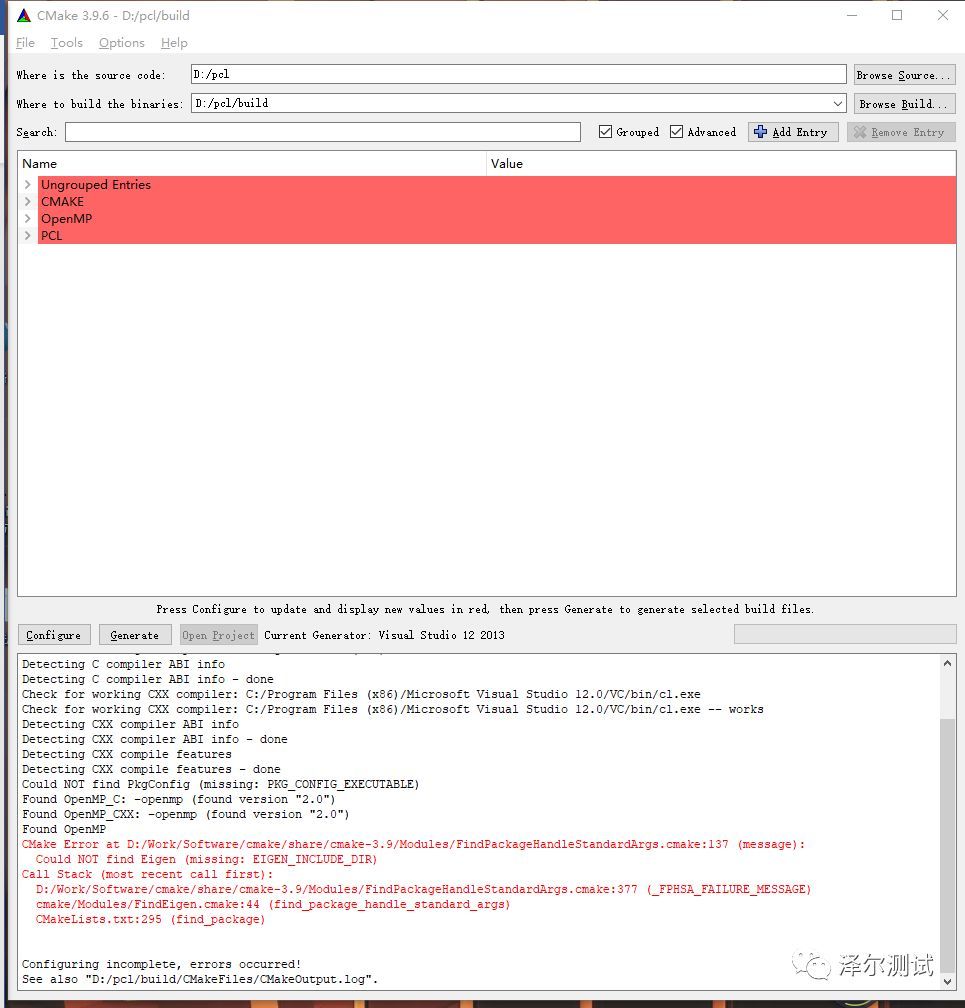
图5未搜索到Eigen库路径
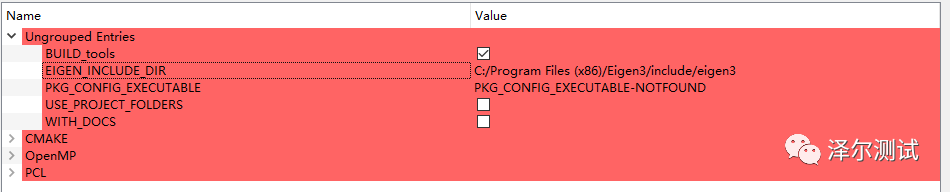
图6 Eigen路径配置
(8)项目生成成功之后,用管理员模式打开项目文件进行All-Build。
(9)运行PCL的测试程序如图7所示。
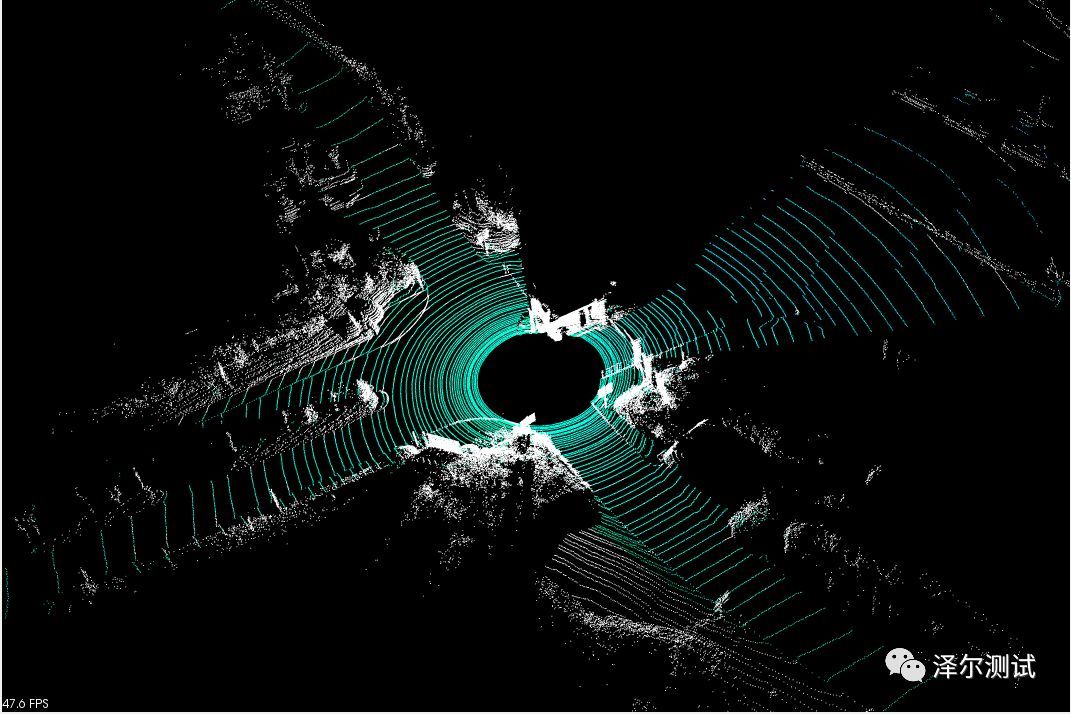
图7 PCL使用测试
责任编辑:














 5701
5701











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









