





1. ICP 算法简介
通常,点云配准分为两步,先做粗配准,再做精配准:
- 粗配准(Coarse Global Registeration):基于局部几何特征
- 精配准(Fine Local Registeration):需要初始位姿(initial alignment)
本文所讲的 ICP 就是最常用的点云精配准算法。
ICP 的经典论文:P.J. Besl, A method for registration of 3-D shapes, 1992.
发表在 IEEE Transactions on Pattern Analysis and Machine Intelligence,此刊在工程技术大类属于1区,算是神刊了。
【大类】工程技术(1区);
【小类】COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE(1区);ENGINEERING, ELECTRICAL & ELECTRONIC(1区);
【2016-2018年平均IF】11.838;
【2017-2018年总被引】102333进入正题......
ICP 算法的第一步就是找到 Source 点云与 Target 点云中的对应点(corresponding point sets),然后针对对应点,通过最小二乘法构建目标函数,进行迭代优化。
1.1 估计对应点(Correspondences estimation)
ICP 称为 Iterative Closest Point,顾名思义,是通过最近邻法来估计对应点的。
对 Source 点云中的一点,求解其与 Target 点云中距离最近的那个点,作为其对应点。
当然,这样操作的时间复杂度很高,为了加速计算,我们不需要计算 Target 点云中每个点到 Source 点云中一点的距离。可以设定一个阈值,当距离小于阈值时,就将其作为对应点。
还有一些其他加速求解对应点的方法,如 ANN(Approximate Nearest Neighbor)。
1.2 迭代优化
找到对应点后,我们就构建了两组对应的点集:
求欧式变换
ICP 算法基于最小二乘法进行迭代计算,使得误差平方和达到极小值:
令
定义质心:
因而,
将
定义去质心坐标:
因此,目标函数变为:
将其代入目标函数,可得:
因而,
由上图可知,
其中,
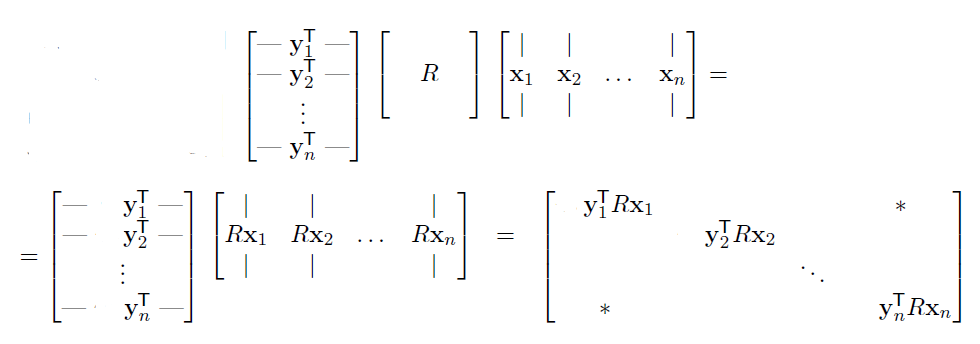
定义协方差矩阵
因而,求解问题变为使下式最大化:
令
当
以下求解 ICP 的代码来自:高翔,视觉SLAM十四讲。
void 2. PCL 库中的 ICP 算法
PCL 库中提供了以下 ICP 的接口及其变种:
- 点到点:pcl::IterativeClosestPoint< PointSource, PointTarget, Scalar >
- 点到面:pcl::IterativeClosestPointWithNormals< PointSource, PointTarget, Scalar >
- 面到面:pcl::GeneralizedIterativeClosestPoint< PointSource, PointTarget >
- ……
其中,IterativeClosestPoint 模板类是 ICP 算法的一个基本实现,其优化求解方法基于 Singular Value Decomposition (SVD),算法迭代结束条件包括:
- 最大迭代次数:Number of iterations has reached the maximum user imposed number of iterations (via setMaximumIterations)
- 两次变换矩阵之间的差值:The epsilon (difference) between the previous transformation and the current estimated transformation is smaller than an user imposed value (via setTransformationEpsilon)
- 均方误差:The sum of Euclidean squared errors is smaller than a user defined threshold (via setEuclideanFitnessEpsilon)
基本用法:
IterativeClosestPointDemo
以下两个demo 来自 PCL Tutorial
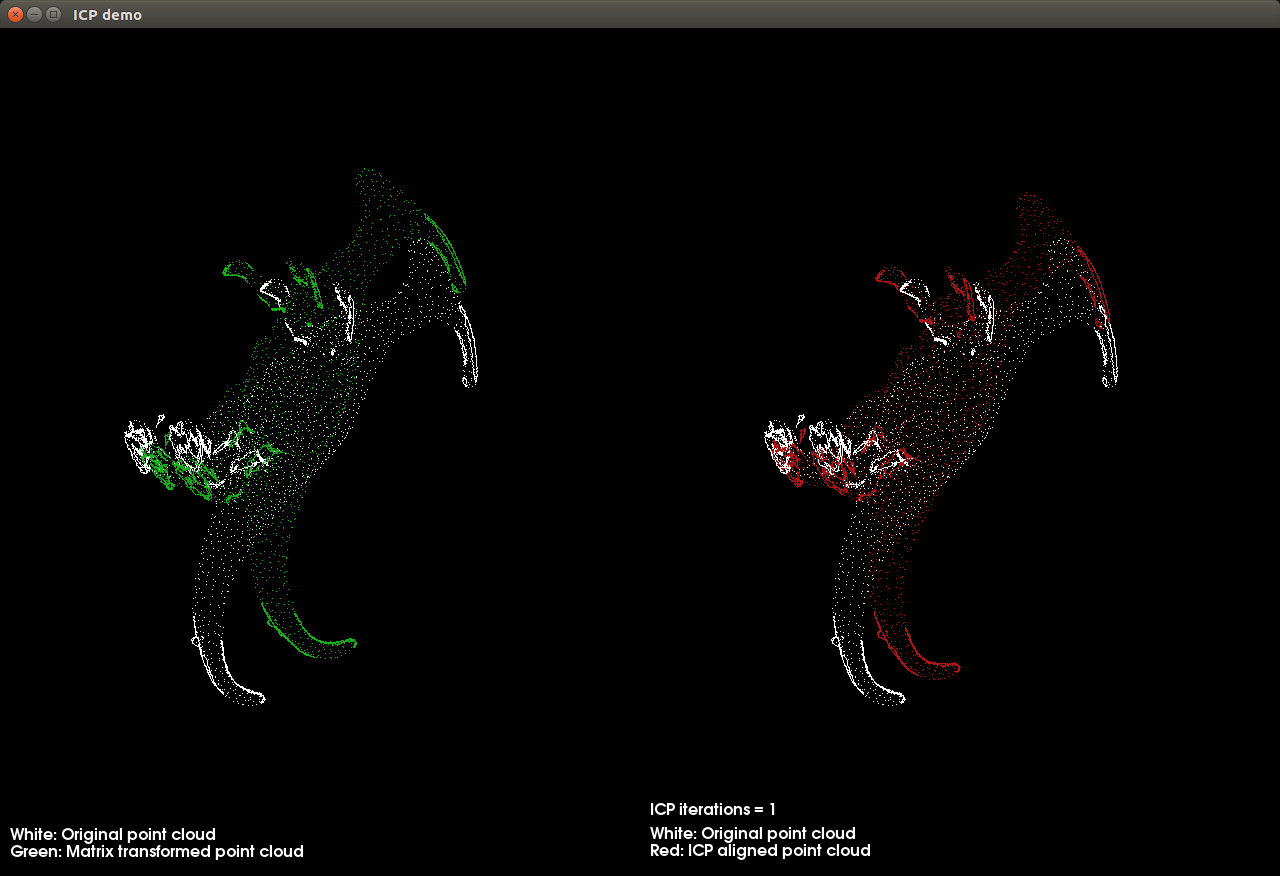
(1)Interactive ICP(交互式 ICP)
Point Cloud Library (PCL)pointclouds.org
效果:按一下空格键,迭代一次
#include (2)Incrementally register pairs of clouds(多幅点云配准)
How to incrementally register pairs of cloudspointclouds.org点云模型:https://github.com/PointCloudLibrary/data/tree/master/tutorials/pairwise
效果:按 q 键进行迭代配准,同时生成配准后的点云
#include 参考
- 高翔,视觉 SLAM 十四讲
- Least-Squares Rigid Motion Using SVD
- ICP(迭代最近点)算法
- PCL点云库:ICP算法
- Interactive Iterative Closest Point
- How to incrementally register pairs of clouds















 36万+
36万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









