







转载文章标注:本文转自CSDN,作者:跃动的风
原文链接:
https://blog.csdn.net/qq_23670601/article/details/91612289
在观看某机器人的视频时,我们看到了这样一个场景:

可以看到机器人在检测到物体的标签后,自主导航至物体之前,并对标签物体进行抓取。那么接下来我想以自己的一个demo个大家分解一下这个任务在ROS下的实现方式。
文末有完整代码。
文章目录
1. 通过AR Tracker识别标签。
2. 将标签的坐标转换到地图(Map)坐标系下,并加入偏移。
3.发送坐标,控制机器人自主导航至目标位置点。
4. 记录一下最终的代码:
1. 通过AR Tracker识别标签。
args="$(arg marker_size) $(arg max_new_marker_error) $(arg max_track_error) $(arg cam_image_topic) $(arg cam_info_topic) $(arg output_frame)" />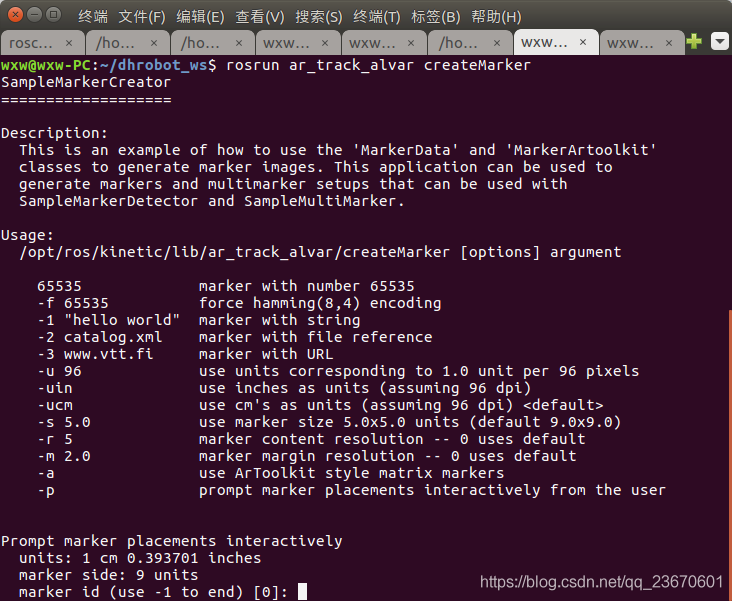
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1539
1539











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









