






 机器人在这两年莫名其妙就成了热门话题了。在人们的想象之中,机器人智慧聪颖,无所不能,仿佛今天就要抢我饭碗,明天就要灭绝人类了。胡思乱想固然容易,不过想让机器人真的做到这些事,可就真是为难了我们这帮工程师了。读硕士期间做了用机械臂搞自动化装配的课题,在串联式机器臂(serial robot)上下了不少功夫。在这篇短文中,我简单总结串联式机器臂的运动学建模与控制,为自己日后温习留作参考,也希望能帮到需...
机器人在这两年莫名其妙就成了热门话题了。在人们的想象之中,机器人智慧聪颖,无所不能,仿佛今天就要抢我饭碗,明天就要灭绝人类了。胡思乱想固然容易,不过想让机器人真的做到这些事,可就真是为难了我们这帮工程师了。读硕士期间做了用机械臂搞自动化装配的课题,在串联式机器臂(serial robot)上下了不少功夫。在这篇短文中,我简单总结串联式机器臂的运动学建模与控制,为自己日后温习留作参考,也希望能帮到需...
机器人在这两年莫名其妙就成了热门话题了。在人们的想象之中,机器人智慧聪颖,无所不能,仿佛今天就要抢我饭碗,明天就要灭绝人类了。胡思乱想固然容易,不过想让机器人真的做到这些事,可就真是为难了我们这帮工程师了。
读硕士期间做了用机械臂搞自动化装配的课题,在串联式机器臂(serial robot)上下了不少功夫。在这篇短文中,我简单总结串联式机器臂的运动学建模与控制,为自己日后温习留作参考,也希望能帮到需要这方面知识的朋友。由于时间有限,知识点繁多,短文可能难免有错。望专家大大多多指教。
短文的内容涵盖了串联式机器臂的正向运动学建模,微分运动建模,与逆向运动学解法。需要用到简单的线性代数和三维旋转表示法(如旋转矩阵),在此不会赘述。有一篇不错的知乎文章可以参考( @鸡哥):
鸡哥:三维旋转:欧拉角、四元数、旋转矩阵、轴角之间的转换zhuanlan.zhihu.com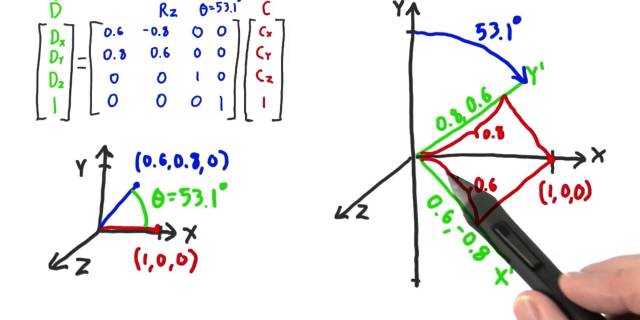
符号
这篇短文牵扯到很多向量。除部分例外(文中另行注明),所有向量都表示为小写粗体的英文字母,比如
本文还用到很多矩阵。所有矩阵都表示为大写粗体的英文字母,比如
Homogeneous Transformation
Homogeneous transformation 是一个线性变换,帮助我们将空间中点的位置表示在不同的坐标系之中。如图1所示,有两个直角坐标系
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









