






单圈绝对值电机等同于增量电机,断电上电位置不记忆,因此需要开机做回零装置。
控制方式:内部位置控制
做回零装置需要加接近开关,这里以3线光电接近开关为例子
接近开关有3根线 分别是 电源+ 0V 信号(常开)
电源+ 接 伺服驱动器的 44脚(伺服内部的24V)
0V 接伺服驱动器的 43脚(伺服内部的0V)
信号 接伺服驱动器的 20脚 (DI1信号)
驱动器参数默认的基础上,修改需要设置的参数
PA14=3 内部位置控制
PA53=1 内部使能
P3-30=2 开启实物IO+虚拟IO
P3-38=28 虚拟DI1位置启动
P3-39=27 虚拟DI2位置暂停
P3-40=33 虚拟DI3启动原点回归
P4-32=2 或 3
2:正转方向原点回归,ORGP 做为回归原点的参考点
3:反转方向原点回归,ORGP 做为回归原点的参考点
P4-34=2
由原点搜寻功能(SHOM)输入接点触发原点回归功能。
P4-36=200
回零速度,回参考点速度
P4-37=30
爬行速度,从参考点到原点位置(编码器零点位置)
P3-0=34
定义 DI1 为参考点
设置上述参数后重启伺服,或者使用软复位指令PA60参数写1
案例如下:
开机后,给指令,电机开始回零
0x011F 写4
回零后设置电机绝对定位到100圈的位置
0x0202写100
设置定位转速100
0x0204写100
启动位置
0x011F先写0在写1
要点:
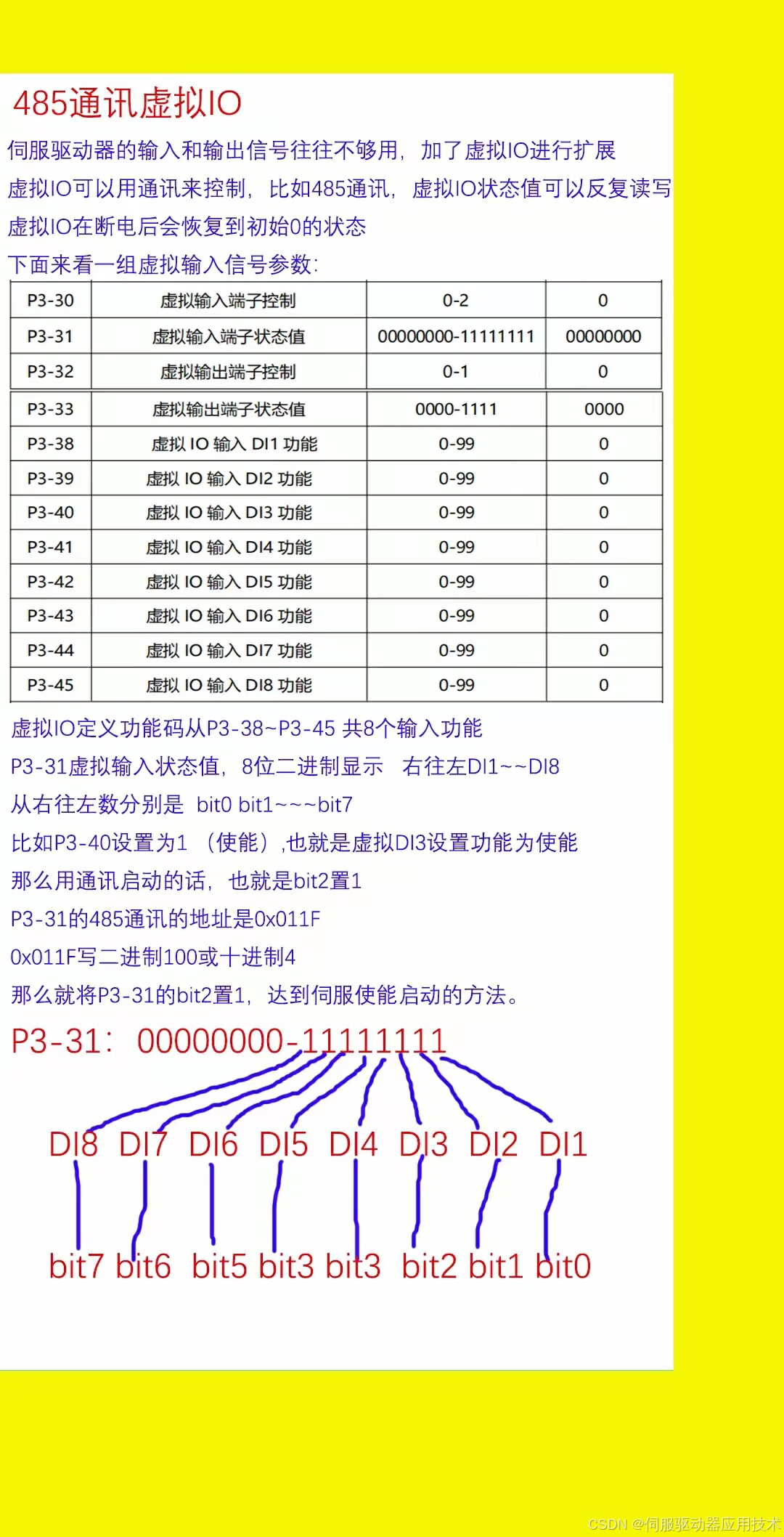
1、011F可以称之为控制字,其实就是P3-31的寄存器地址,修改虚拟DI的电平达到启动的目的
2、启动回零定义到虚拟DI3上,为什么011F要写4? 011F(P3-31)比较直观的就是位参数,可以用下面一张图来描述。
3、单独启动虚拟DI1那么控制字写1 单独启动虚拟DI2那么控制字写2 单独启动虚拟DI3那么控制字写4,单独启动DI1 2 3 4 5.......也就是1 2 4 8 16.......启动DI1+DI2+DI3也就是二进制111 十进制1+2+4=7

















 451
451

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









