







目标
在这一章当中,
我们将了解FAST算法的基础知识
我们将使用OpenCV功能为FAST算法找到角点。
理论
我们看到了几个特征探测器,其中很多都非常棒。但从实时应用角度来看,它们速度不够快。一个最好的例子是SLAM(同时定位和映射)移动机器人,其计算资源有限。
作为一种解决方案,Edward Rosten和Tom Drummond在2006年的论文“用于高速角点检测的机器学习”(稍后在2010年对其进行了修订)中提出了FAST(来自加速段测试的特征)算法。下面介绍该算法的基本概述。有关更多详细信息,请参阅原稿纸张(所有图像均取自原始纸张)。
使用FAST进行功能检测
选择
 要识别为兴趣点的图像中的像素。让它的强度成为
要识别为兴趣点的图像中的像素。让它的强度成为
 。
。
选择适当的阈值
 。
。
考虑围绕被测像素的16个像素的圆圈。(见下图)
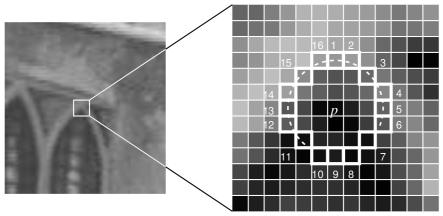
现在像素
是一个角落,如果
 在圆圈(16像素)中存在一组连续的像素,这些像素比这些都亮
在圆圈(16像素)中存在一组连续的像素,这些像素比这些都亮
 或比它们都暗
或比它们都暗
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 6240
6240











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









