






由于点云模型不包含拓扑关系,仅由离散点构成而没有面结构,在显示时难以添加光影效果,也无法体现各个面的关系,这使得模型的显示不直观。需要对点云模型三角化,以三角面片集合的形式来显示点云模型。
网格主要用于计算机图形学中,有三角、四角网格等很多种。计算机图形学中的网格处理绝大部分都是基于三角网格的,三角网格模型将一个完整的模型近似看作由众多三角面片连接组合而成,通过控制三角面片的大小与数量就可以控制模型的精细程度。这种方法可以表示各种类型的复杂曲面,具有很好的适应性,并且可以在计算机中直观的显示。
三角网格有如下几个优点:
1、三角网格稳定性强。
2、三角网格比较简单(实际上三角网格是最简单的网格类型之一),可以非常方便并且快速生成,在非结构化网格中最常见。
3、有助于恢复模型的表面细节。
三角网格需要存储三类信息:
1、顶点:每个三角形都有三个顶点,各顶点都有可能和其他三角形共享。
2、边:连接两个顶点的边,每个三角形有三条边。
3、面:每个三角形都对应一个面,我们可以用顶点或边列表来表示面。
三角网格生成算法需要如下的能力:
1、对点云噪声有一定的冗余度。
2、能够重建出曲率变化比较大的曲面。
3、能够处理较大的数据量,算法时间和空间复杂度不会太高。
4、重建出的网格中包含尽可能少的异常三角片,比如三角片交错在一起、表面法向量不连续或不一致、同一个位置附近出现多层三角片等。
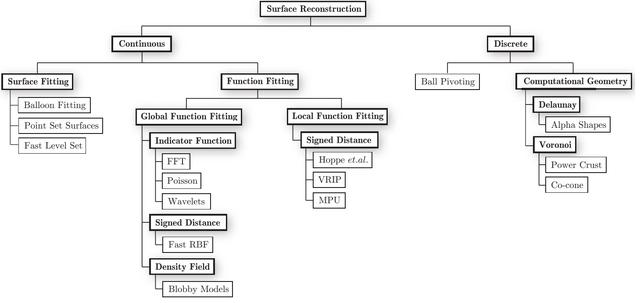
目前点云进行网格生成一般分为两大类方法:
1、离散法。顾名思义,也就是重建的曲面都是直接通过点云数据得到的。
2、连续法。用点云数据拟合某些函数来得到曲面模型,得到的重建曲面是原始点集的一个逼近。
三角剖分算法
作者:Gree
来源:土拨虎机器人行业互动全媒体















 2756
2756











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









