






 该博客介绍了如何在MATLAB中使用SUMO进行fvdm跟驰模型和车道换道的微观仿真,以优化交通效率。作者复刻了一篇关于间歇式公交专用道的研究,模拟了三车道场景,控制单车辆行为,并实现了基于拥堵情况的社会车辆换道和跟驰策略。仿真平台的搭建和车辆控制策略,包括跟驰规则(加速、减速、慢启动、随机慢化)和换道规则(相邻车道空间、安全距离)进行了详细说明。
该博客介绍了如何在MATLAB中使用SUMO进行fvdm跟驰模型和车道换道的微观仿真,以优化交通效率。作者复刻了一篇关于间歇式公交专用道的研究,模拟了三车道场景,控制单车辆行为,并实现了基于拥堵情况的社会车辆换道和跟驰策略。仿真平台的搭建和车辆控制策略,包括跟驰规则(加速、减速、慢启动、随机慢化)和换道规则(相邻车道空间、安全距离)进行了详细说明。
本次复刻的论文是《停靠站附近间歇式公交专用道适用条件研究》,发表在华东交通大学学报,时间为2020年。
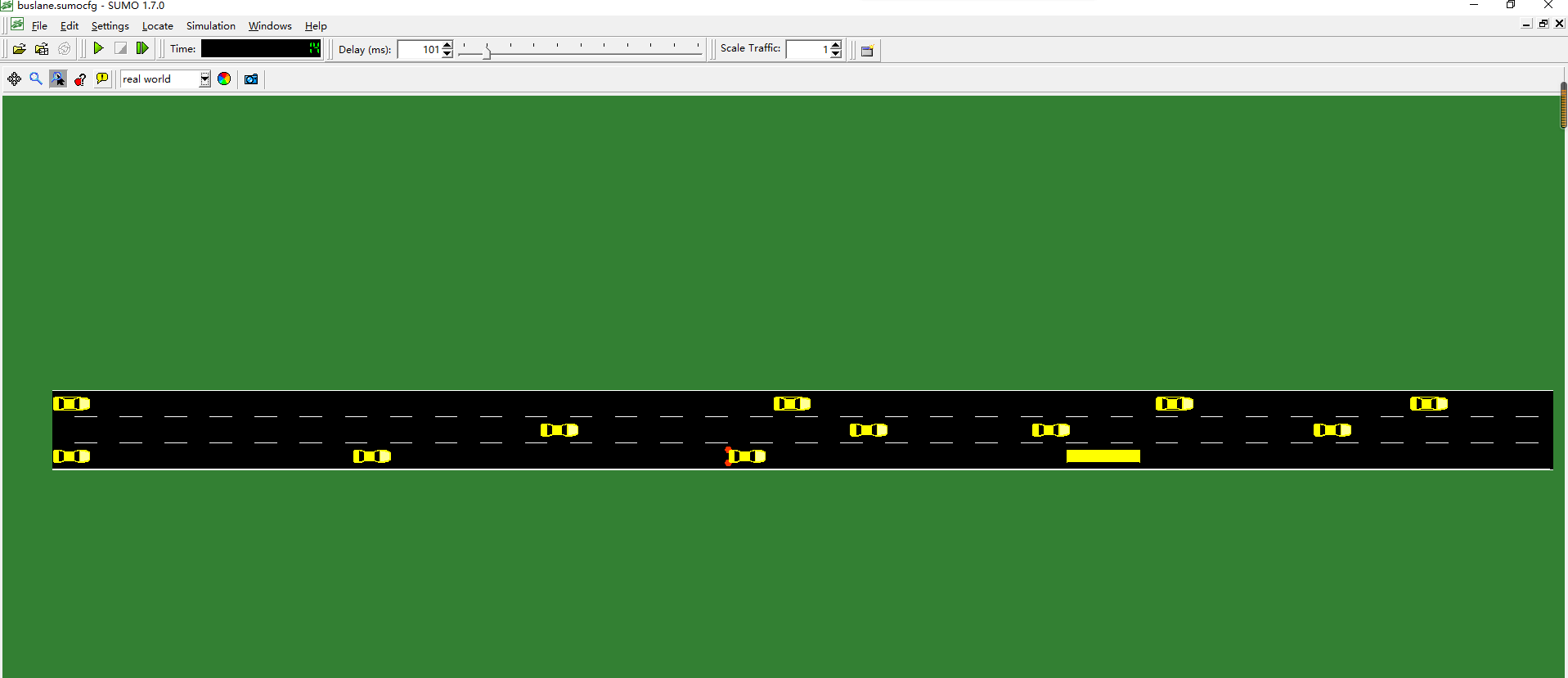
首先简要介绍这篇文章,间歇式公交专用道(IBL)允许社会车辆行驶在公交车道上,能够有效的提升车辆的通行效率,基于IBL的研究,这篇文章主要优化了车辆跟驰规则和换道规则,建立了三车道元胞自动机车辆换道模型。这次基于SUMO的微观仿真,对单车进行逐一控制,在简化这篇文章模型的同时,完成了仿真平台的搭建。最终达到的效果简单概括即是,在车联网的环境下,社会车辆基于拥堵状况及时换道并且不影响公交车的通行,在同一车道上车辆采取跟驰策略,最终提升通行效率。
一、道路文件的产生
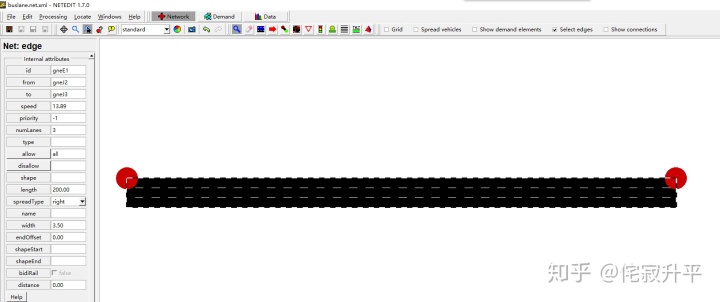
文章中模拟路段为200m,不考虑交叉口,车道数为3,本次复刻不考虑公交车的到站停靠。画出三车道路段如下图并保存为buslane.net.xml文件。
二、车辆文件的产生
车辆文件buslane.rou.xml由vehicle_generate.py文件产生。包括三部分,分别为车辆本身、车辆类型和路线。本次仿真中涉及两类车辆,分别为社会车辆和公交车,其车辆属性取值由文章给出如下。
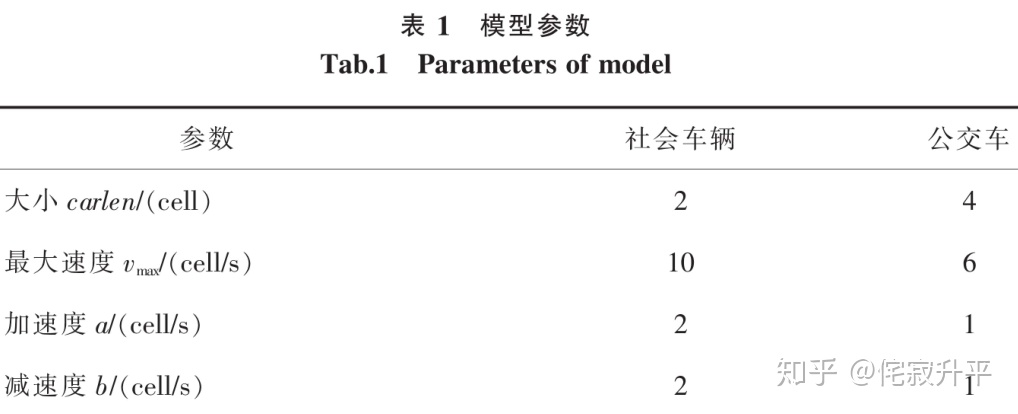
由此可写出.rou.xml文件中的车辆类型为
<vType id="bus" accel="2" decel="2" length="10" maxSpeed="12" guiShape="bus"/>
<vType id="car" accel="4" decel="4" length="5" maxSpeed="20" guiShape="passenger"/>SUMO中最右侧、中间和左侧车道定义分别为0,1,2,公交车只行驶在最右侧车道,本次仿真中公交车流量约为100pcu/h,最右侧、中间和左侧车道的社会车辆流量分别约为3600pcu/h,1500pcu/h,1500pcu/h,通过循环,可以控制车辆生成的数量;本次的车辆路线唯一。
三、主控制文件
主控制文件为mainFunction.py,总仿真时间为3600s,通过多次调用traci接口,实现每个仿真步长(1s)控制车道上每辆车的效果。主控制函数如下。注意其中的run函数,在每步仿真中,它真正发挥作用从而实现单车控制。
if __name__ == "__main__":
options = get_options()
if options.nogui:
sumoBinary = checkBinary('sumo')
else:
sumoBinary = checkBinary('sumo-gui')
traci.start([sumoBinary, "-c", "C:/Users/liqin/Desktop/buslane/buslane.sumocfg", "--tripinfo-output",
"tripinfo.xml"]) # 多次调用
for step in range(0, 3600):
while traci.simulation.getMinExpectedNumber() > 0:
traci.simulationStep()
run()
traci.close()
sys.stdout.flush()run函数具体代码如下图,其中驾驶员反应时间为0.5s。根据这篇文章中的解释,驾驶员的换道行为一般受到换道动机和换道条件的制约,因此需要决策是否需要换道。若进行换道,则采取SUMO内部的换道模型,利用traci.vehicle.changeLane进行控制;若不进行换道,则采用文章中的跟驰规则,生成下一时刻的车辆速度与位置。
def run():
for carID in traci.vehicle.getIDList():
p = 0.5 #驾驶员反应时间
if traci.vehicle.getLanePosition(carID): #车辆在车道上进行控制
lane = traci.vehicle.getLaneID(carID)
changeLane = controlModel(carID).changeLane()
if lane == "gneE1_0":#如果在最右侧车道
if changeLane[0]:#如果进行换道,则换至中间车道,换道时间为10s,下同
traci.vehicle.changeLane(carID, 1, 10)
else:#如果不进行换道,则更新速度与位置,下同
speed_next = controlModel(carID).speed_generate()
traci.vehicle.setSpeed(carID, speed_next)
traci.vehicle.moveTo(carID, lane, speed_next*(1+p)+traci.vehicle.getLanePosition(carID))
elif lane == "gneE1_2":#如果在最左侧车道
if changeLane[0]:
traci.vehicle.changeLane(carID, 1, 10)
else:
speed_next = controlModel(carID).speed_generate()
traci.vehicle.setSpeed(carID, speed_next)
traci.vehicle.moveTo(carID, lane, speed_next*(1+p)+traci.vehicle.getLanePosition(carID))
elif lane == "gneE1_1":#如果在最中间车道
if changeLane[0]:
if changeLane[1]:
traci.vehicle.changeLane(carID, 2, 10)
elif changeLane[2]:
traci.vehicle.changeLane(carID, 0, 10)
else:
speed_next = controlModel(carID).speed_generate()
traci.vehicle.setSpeed(carID, speed_next)
traci.vehicle.moveTo(carID, lane, speed_next*(1+p) + traci.vehicle.getLanePosition(carID))四、跟驰规则与换道规则
文章中的跟驰规则与换道规则定义在controlModel.py文件中,定义类controlModel。根据主控制文件发现,我们主要要返回的是两点,一是是否要进行换道的决策(布尔值),二是下一时刻的速度值。在这里我们分开讨论。
跟驰规则,返回下一时刻的车辆速度值,用speed_generate函数生成。根据文章内容,跟驰规则主要分为加速过程、减速过程、慢启动现象、随机慢化四个部分,有了下一时刻的速度,下一时刻的位置更新就好求解了。在这四个部分中,获取当前车道的前车id、相邻车道的前车id和相邻车道的后车id是十分重要的,相邻车道的前后车id的寻找思路相同,因此以下只列举找到同车道前车id和后车id的代码,利用遍历可得。寻找相邻车道的前后车id时,注意中间车道的相邻车道有两个,因此需要分别找到其相邻两个车道的前车id。
#得到前车id
def frontCar(self):
m= 200
vehicle_frontCarID=""
for carID in traci.vehicle.getIDList():#找到车辆的前车
lanePosition = traci.vehicle.getLanePosition(carID)
if traci.vehicle.getLaneID(carID) == self 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 141
141

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









