






前言
上一篇推送阐述了Webots+Matlab/Simulink在开发中的意义,今天这篇推送描述具体怎么操作。
前段时间在B站和youtube找到一个做Webots + Matlab/Simulink的联合仿真Demo,但没有找到具体实现过程,我琢磨了很久尝试成功,但是和视频中的效果略微不同。
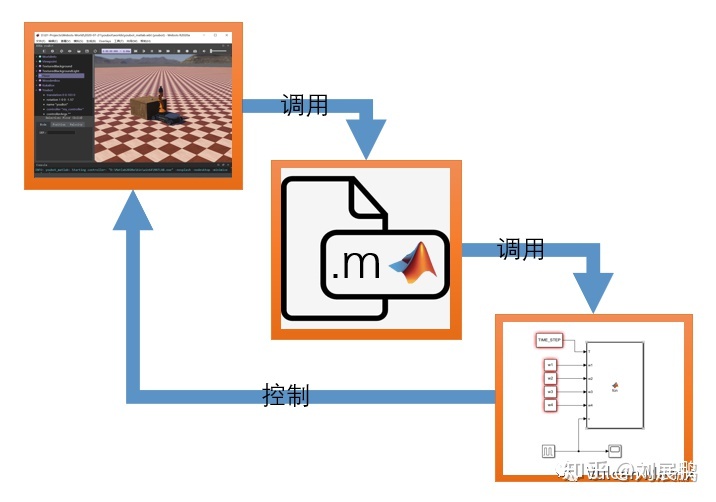
主要思想:Webots本身可用Matlab编写机器人的控制器,我们可以在Matlab编写.m文件中执行Simulink模型,Simulink模型中使用matlab fcn模块调用Webots提供的API,但要对调用API的函数做些许修改才可以使用。
本文与之前提到的视频相同,使用Webots内置的Kuka youBot机器人为实验对象。我将实现借助Matlab/Simulink编写控制器使youBot底盘向侧向平移运动。
1.新建机器人控制器
在Webots中打开youBot_matlab的示例World文件,然后另存为自己的World这样就可以基于这个文件进行修改。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 715
715











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









