






为了定量描述物体的位置及位置变化,我们需要用到坐标系作为参考方法。我们在调试机器人的过程中经常用到的这几大坐标系,小伙伴们都有了解多少呢?
一、大地坐标系

大地坐标系是以大地地面为基准的坐标系,将机器人正常安装的情况下,机器人的大地坐标系与基坐标系一致,都依据机器人安装底座为原点。除此之外,我们在安装调试的过程中,有三种情况机器人的大地坐标系与基坐标系是不一致的:
1、当机器人侧面安装的时候,此时机器人的基坐标系垂直于大地坐标系。
2、当机器人倒装的时候,此时机器人基坐标系与大地坐标系z轴相反。

3、当机器带有外部行走轴的时候,此时机器人基坐标随机器人运动。

二、基坐标系

基坐标系是依据机器人安装底座标定的坐标系,基坐标系的确立便于记录机器人各轴运动位置的改变。在有些国产机器人系统中会有“一键回零”操作,此操作就是依据基座设定。
三、工具坐标系

工具坐标系根据机器人所携带的执行工具不同而改变,工具坐标系的设定就是我们常说的建立TCP,将工业机器人默认的法兰中心点设置为所持工件的执行点。比如普通焊枪的末端(一般定在焊丝顶端);
四、工件坐标系
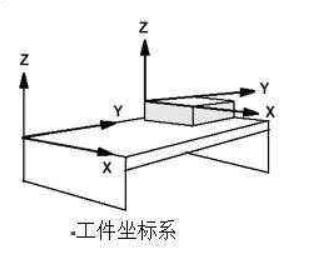
在调试工业机器人的过程中,可根据需求,依据工件的特征建立工件坐标系,保存用户数据后,即使加工的平台发生改变了,调整坐标系参数,原编程程序仍然可以使用。
【文中图片均选自网络,如有侵权请联系作者或公众号删除】















 1319
1319











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









