







 本文解读了《极限工况下无人驾驶车辆稳定跟踪控制》论文,探讨了8字型路径和U型弯道的仿真研究,其中车辆在80km/h速度下转向,最大离心加速度达0.5G。论文提出的控制器设计复杂,展现了无人驾驶在极限条件下的挑战。路径跟踪控制的极限工况时代即将来临。
本文解读了《极限工况下无人驾驶车辆稳定跟踪控制》论文,探讨了8字型路径和U型弯道的仿真研究,其中车辆在80km/h速度下转向,最大离心加速度达0.5G。论文提出的控制器设计复杂,展现了无人驾驶在极限条件下的挑战。路径跟踪控制的极限工况时代即将来临。
《极限工况下无人驾驶车辆稳定跟踪控制》是期刊《汽车工程》在2020年第42卷第8期上刊载的一篇论文。《汽车工程》是EI检索期刊,2019年复合影响因子1.391,综合影响因子0.787。
该论文的作者是陈龙、解云鹏、蔡英凤等。作者单位为江苏大学。
这篇论文的聚焦点是极限工况,所以笔者直接跳到了仿真部分进行阅读。仿真的车辆轴距为2.46m,第一组仿真采用的是8字型路径,由直线和圆弧组成,圆弧部分曲率为0.01,即圆弧半径为100m,第二组仿真采用的是直线、螺旋线、圆弧组成的U型弯道,路径的最大曲率不超过0.01。仿真的地面附着系数设置为0.5。仿真中,转向时的速度约被控制到了80km/h,即22.22m/s。结合路径半径可知,最大离心加速度为4.937m/s^2,即0.5G。所以这项工作确实属于极限工况下的研究工作,具有较强的开创性。
回到论文的设计部分,我们可以看到论文提出的控制器的整体框架(图片源自原文):
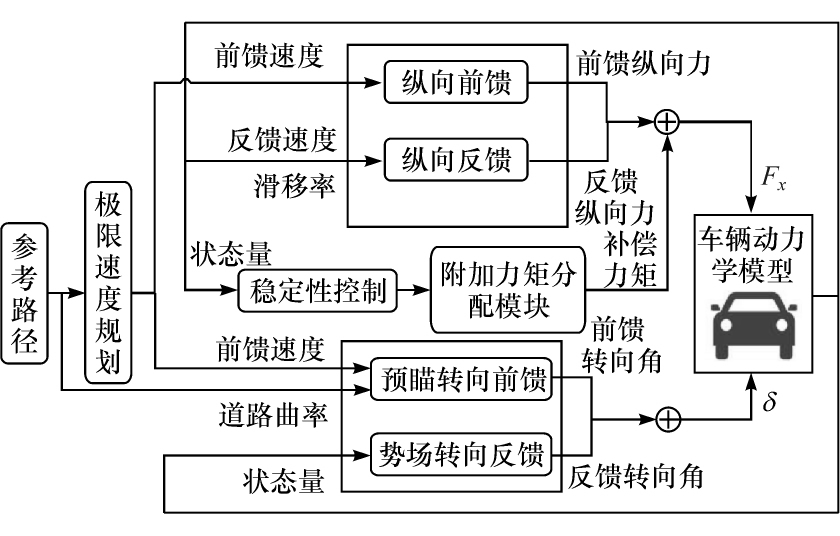
从中我们可以发现,这个控制器的设计过程,有点……复杂。
所以看到这里我们可能有点开心,毕竟还有事可搞。
不过我马上要告诉大家一个坏消息,上期分析的那篇论文,Falcone大佬的那篇《MPC-based yaw and lateral stabilisati
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 2662
2662











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









