






一、背景介绍
在实际工程问题中, 测量信号经常有不连续或带有随机噪声的问题, 但经常需要提取连续信号以及对应的微分信号。
比如用编码器做速度检测时, 需要由数字的绝对位移信号提取速度信号,并进一步提取加速度信号等。
20世纪80年代末期,系统与控制专家韩京清在吸收并丰富PID控制精髓(基于误差来消除误差)的基础上,针对PID控制的缺点(对增益变化太敏感、快速性与超调之间的矛盾、没有合适的微分器、对变化的扰动抑制能力不显著等),相继开发出非线性跟踪微分器、扩张状态观测器、非线性误差反馈机制等对信号处理及控制具有独特功能和效率的新型非线性动态结构,统称为自抗扰控制技术。
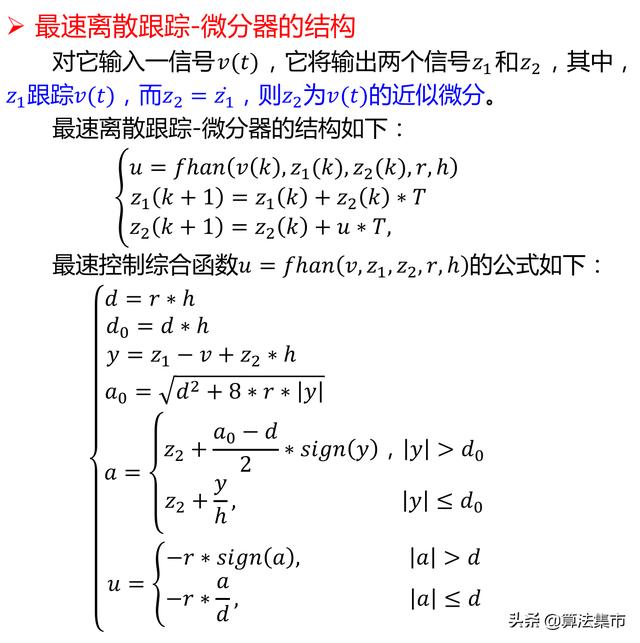
二、最速离散跟踪-微分器
关于跟踪微分器的理论推导见韩京清的《自抗扰控制技术》这本书,这里对最速最速离散跟踪-微分器的结构及公式做一个简单介绍,并通过仿真观察最速离散跟踪-微分器的信号滤波和提取微分信号的效果。
三、Matlab代码
仿真测试步骤:
- 创建测试信号
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 315
315











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









