







导读
大自然的物种经过数百万年的进化,适应了它们各自的生存环境。当研究者想要设计于某种特定环境下使用的机器人时,不妨参考那个环境中生存的动物和植物来获得灵感。近几年来随着海洋资源开发的加速,游泳机器人有着很大的实用价值。研发能够稳定的,安全的和水中的环境交互的机器人是十分有必要的。青蛙不仅仅有很好的跳跃能力,它们更具有能够在水中稳定快速游泳的能力。来自哈尔滨工业大学的机器人技术与系统国家重点实验室近期发表在国际期刊《软体机器人(Soft Robotics)》上的一篇论文介绍了一款受到青蛙启发的高度仿生机器蛙。这款机器蛙的腿部结构由软材料和硬材料组成,好似蛙腿的骨骼和肌肉一般,研究者设计的高度仿生的“机器蛙腿”完美还原了青蛙游水的动作,这款机器蛙能够很好的适应不同的环境,为游泳机器人的设计提供了新的思路。文末附有论文题目和完整视频。

小青蛙游水
1.也许是迄今为止最灵动的仿生机器蛙
仿生运动学的研究是仿生学研究的一大分支,由于生物系统及其的复杂性,科学家们可以借鉴的动物种类太多了,天上飞的,地上跑的,水里游的,还有墙上爬的,设计了各种各样的仿生机器人。如图的来自MIT的猎豹机器人,来自Festo公司的仿生小章鱼,蜘蛛,蝙蝠,以及来自斯坦福大学的壁虎机器人。

常见的仿生机器人
今天小编要介绍一款受到小青蛙启发的,灵动的仿生机器蛙,它的游泳姿势和真正的青蛙相比,惟妙惟肖。该研究是由来自哈尔滨工业大学机器人技术与系统国家重点实验室的近期发表于国际顶级期刊《软体机器人(Soft robotics)》上。

仿生机器蛙的游泳
这款小机器蛙的重量大约1.29kg, 躯干部分的尺寸是17.5cmx10cmx6cm,后腿的完全展开长度是15.2cm,文末附有相关论文以及视频。机器蛙的腿部由软材料和硬材料巧妙结合制成,关节部分是气动软体致动器(硅胶)。因此机器蛙腿具有结构简单,能够复杂变形,柔软以及能够主动适应环境的特点。

高度仿生的软体机器蛙腿
研究者指出,由青蛙启发的仿生游泳机器人有着很大的研究价值,利用软材料制作的机器人可以让机器人重量更轻,有着一定的适应能力。青蛙精妙的骨骼系统可以帮助它们适应各种不同的环境。相比于其他的游泳方式,青蛙双足协调的游泳姿势可以避免侧向力,让青蛙游的更稳定,同时,短时间内也可以获得一个较大的游泳速度。
通过研究青蛙的骨骼结构,研究者发现,青蛙的重量主要集中在躯干部份,腿部的重量相对来说是比较小的。在青蛙的腿部有着强壮的肌肉,尤其是后退,为青蛙的跳跃和游泳提供足够的能量。

青蛙的骨骼结构和仿生机器蛙的结构
青蛙后腿的关节包括髋关节,膝关节和踝关节,前腿包括肘关节和肩关节。其中,后退的髋关节和前腿的肩关节有着内收,旋转和舒张三种动作,其他关节位置只有一个自由度。前后腿都有一个软的鳍足(flipper)可以折叠和打开。
题外话:蛙腿火锅(对不吃青蛙的小伙伴说声抱歉)固然美味,但能够基于青蛙骨架和肌肉研发个仿生机器人出来才厉害是吧。

田鸡火锅
为了设计机器蛙,研究者分解了青蛙游泳的过程。青蛙的游泳过程可以分为推进(propulsion),滑行(sliding)和复原(recovery)三个阶段。在推进阶段,蛙腿快速地向后蹬出,膝关节和踝关节都逐渐打开,形成推动力。在滑行阶段,前腿和后腿保持静止状态,呈现舒展状态,减小阻力。在复原阶段,后腿缓慢收缩至推进阶段前,期间,鳍足呈现收起状态,从而减小水的阻力。

青蛙游泳的分析

青蛙游泳
我们先来感受一下“机器青蛙”灵动的游泳姿势。机器蛙的直线游泳速度大约是7.5cm/s,转弯速度大约为5度/s,文末附有完整视频和论文链接。在下一部分会具体介绍机器蛙腿部的仿生设计,以及它的控制。

机器蛙直线游泳

机器蛙借助泳池壁

机器蛙转弯
2. 仿生机器蛙的结构设计和测试
为了设计高度灵活的仿生蛙腿,研究者提出了一种新型的关节式 (articulated) 气动软体致动器(pneumatic softactuator),用来实现灵巧的,柔顺的关节控制和运动。该致动器由弹性体气腔,应变限层,增强纤维,以及固定端组成。致动器的初始状态为弯曲状态,当内部气压升高的时候,由于应变限制层的限制,致动器的外侧保持不膨胀,只有内侧开始膨胀,因此,致动器会沿着圆弧逐渐伸展打开,由此产生的扭矩可以驱动机器人腿部的运动。

关节气动软体致动器
在得到了一个单独的关节致动器后,便可以基于之前分析的青蛙的解剖学,进行模块化设计的思维设计出整条前腿和后腿了。其中,蛙腿和躯干的连接件是由3d打印制成。在后腿的部分,里面内嵌有硬质3d打印的骨骼作为结构的支撑。其余柔软可动的部分是由硬度为SHORE A70的硅胶制成。

蛙腿的构成和运动
后腿是为机器蛙游泳提供主要动力的结构。基于机器蛙后腿的运动学分析,研究者绘制出了后腿的伸展轨迹图,可以看到,鳍足完全打开,和身体前进方向呈90度角的划水的轨迹占据了很大一部分区间。由此可以产生巨大的推力推动小青蛙在水中的前行。
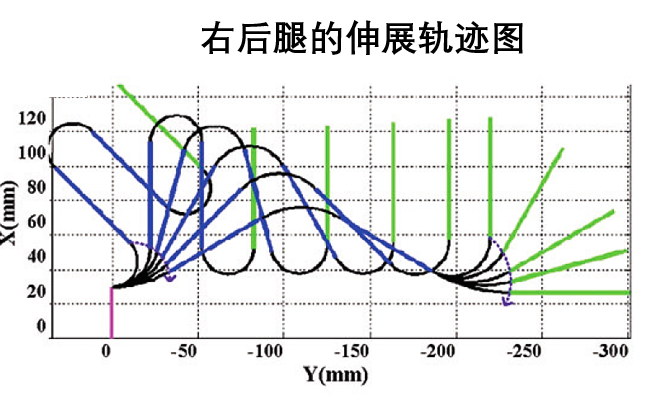
机器蛙后腿的运动学分析
另外,后腿髋关节的部位也可以沿着青蛙的前进轴进行转动,从而保证了整条后腿在游泳期间总是浸没在水下,也因此提供了更多的推力,另外也可以变换姿态来模拟真实青蛙的游泳运动。
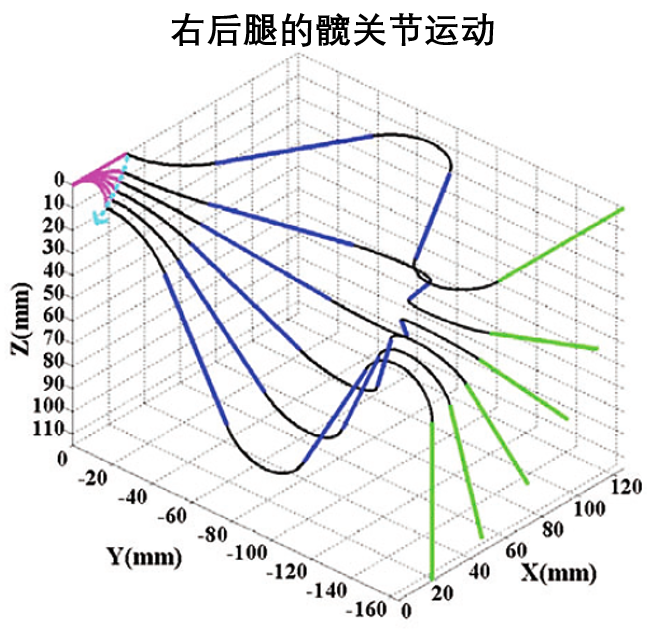
后腿髋关节运动图
在设计好蛙腿后,接下来就是将其集成为一整个“机器蛙”。研究者设计制造了一个微型的气动控制平台(包括了所有的电子和启动设备),全部集中到机器人的躯干部份。机器蛙的躯干结构是刚性的,具有良好的水密性来防止精密电路的损毁。同时很重要的一点就是它的体积要足够的大,从而能够提供适当的浮力将机器蛙刚好漂浮在水表面。

机器蛙的躯干部分的设计

机器蛙的气动控制系统设计
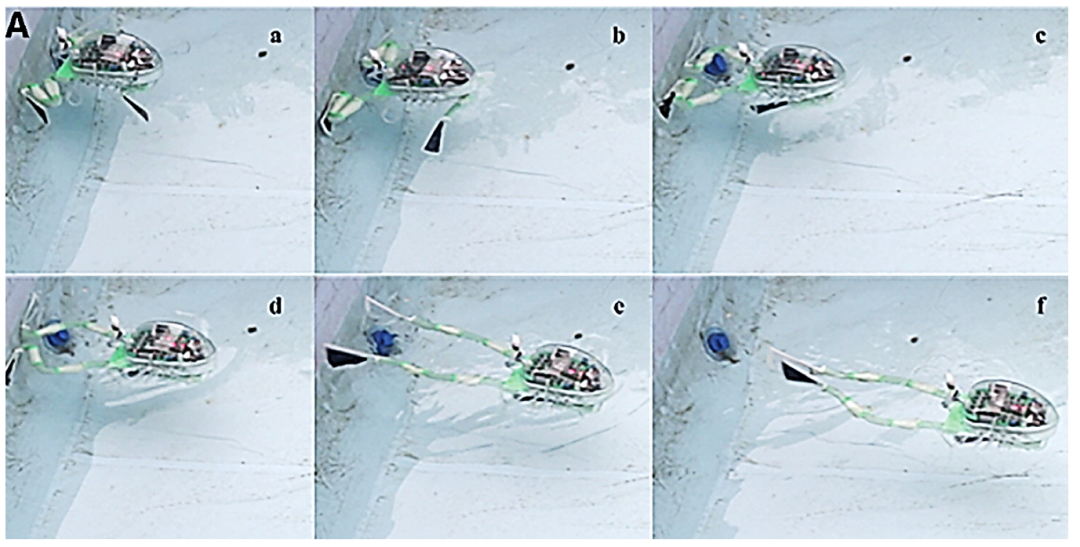
机器蛙前进的完整状态展示如图,整个的游泳周期大约为6秒钟。前进的平均速度是7.5cm/s。通过研究发现,后腿在游泳过程中起到主要的作用,但是前腿的运动也是有必要的。前后腿的协调运动能够帮助机器蛙游的更加顺畅和快速。

一次完整的游泳姿态展示
另外研究者还展示了特殊的应用场景,例如和环境发生交互,比如说蹬游泳池壁起到助推的作用,还有和复杂的水草环境之间的交互。这些测试都从一定程度上体现了借助于软体致动器的优势,既不会对机器人本身造成损坏,对环境的影响也比较小,对未知的环境有着比较强的适应能力。
借助于墙壁的蹬腿前进

携带无线摄像头探索未知的复杂环境
3. 总结与展望
小机器蛙的游泳速度虽然没有很快,但是它巧妙的腿部结构设计以及精妙的控制让机器蛙的泳姿和真实的青蛙真假难辨。研究者希望通过进一步对结构进行优化,在未来能够研制出更小型的机器蛙,用于水下探索,水面环境监测等。
希望小编整理的报道能够让大家了解到机器蛙的设计理念,同时也启发大家能够从动物界获得灵感,解决工程上的,生活中的问题。
文末视频:
文章题目与链接:
Fan, J.,Wang, S., Yu, Q., & Zhu, Y. (2020). Swimming Performance of the Frog-InspiredSoft Robot. Soft Robotics.
https://www.liebertpub.com/doi/10.1089/soro.2019.0094
古月居原创作者签约计划已开启,网站(guyuehome.com)已上线【投稿】功能,欢迎大家积极投稿,原创优质文章作者将有机会成为古月居签约作者。
点个“在看”表示朕
已阅















 548
548











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









