






四足机器人模型建立
单腿简化模型:
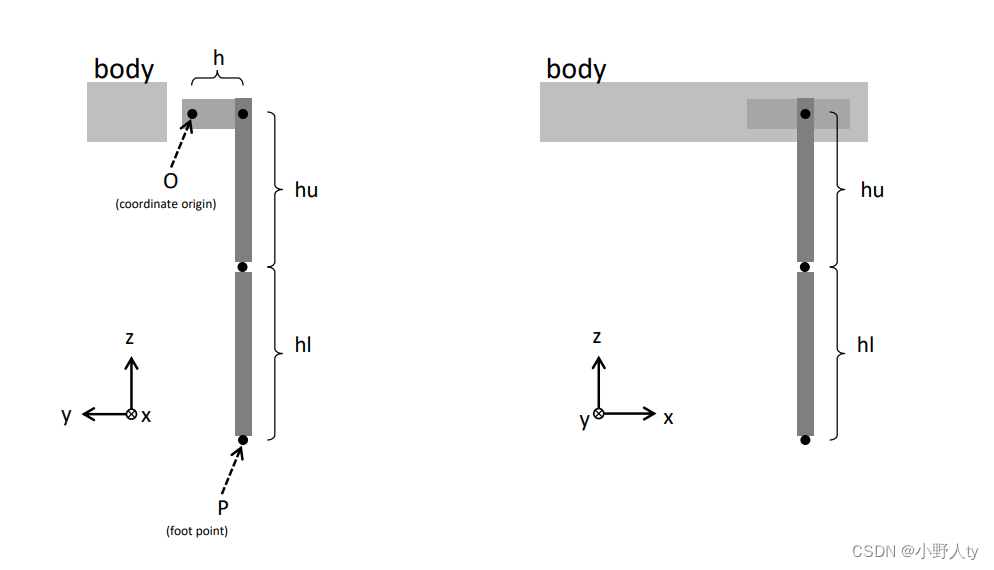
几何法计算
通过上图两个方向单腿模型,可建立方程得到末端位置与关节角度关系
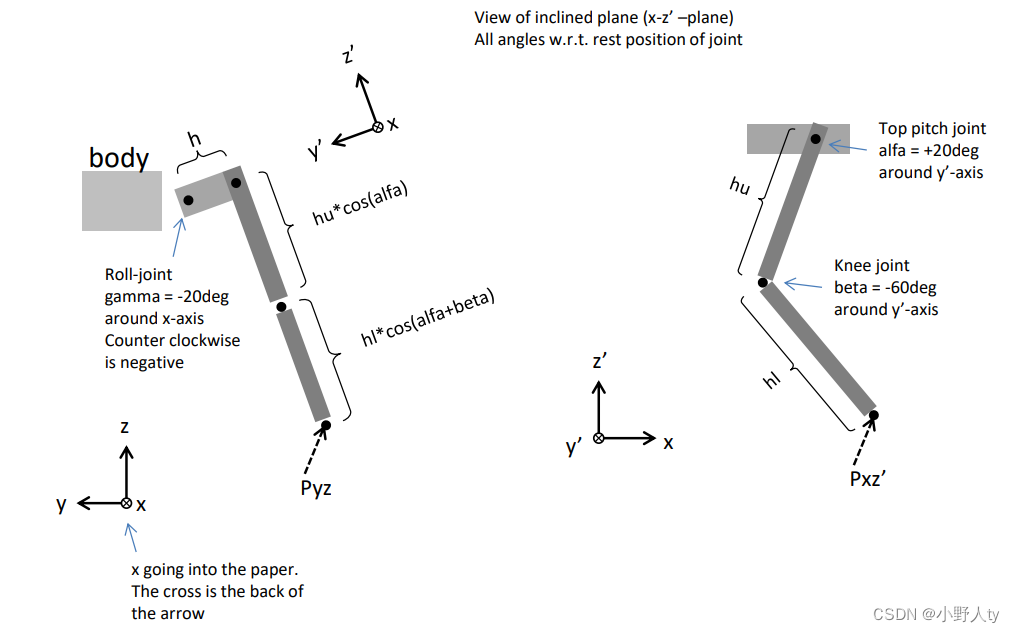
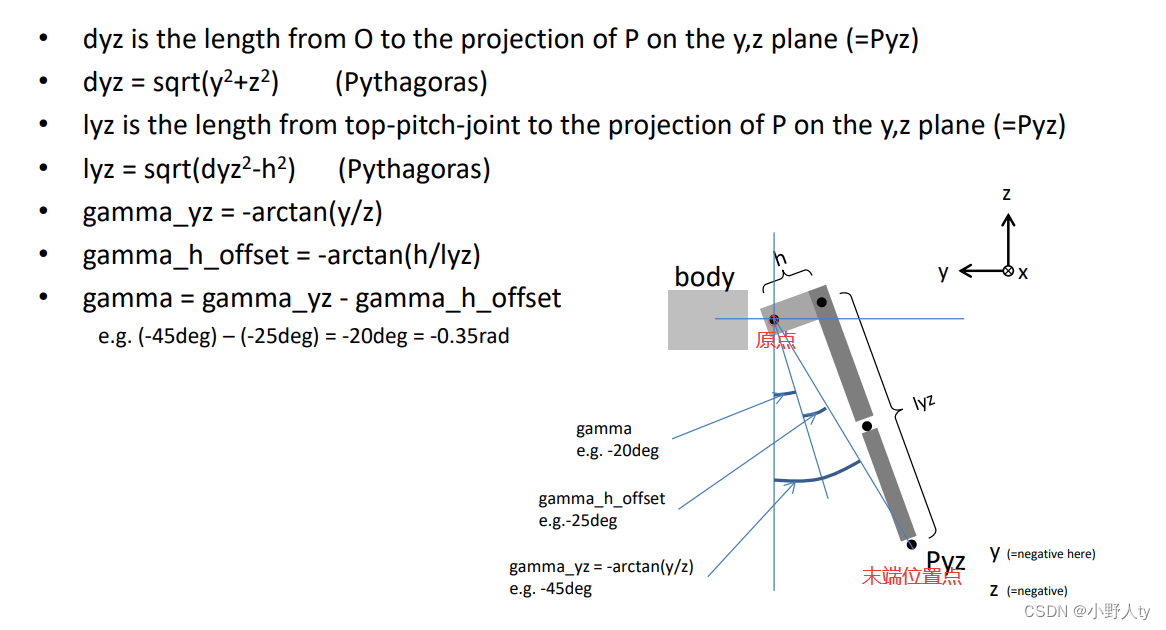
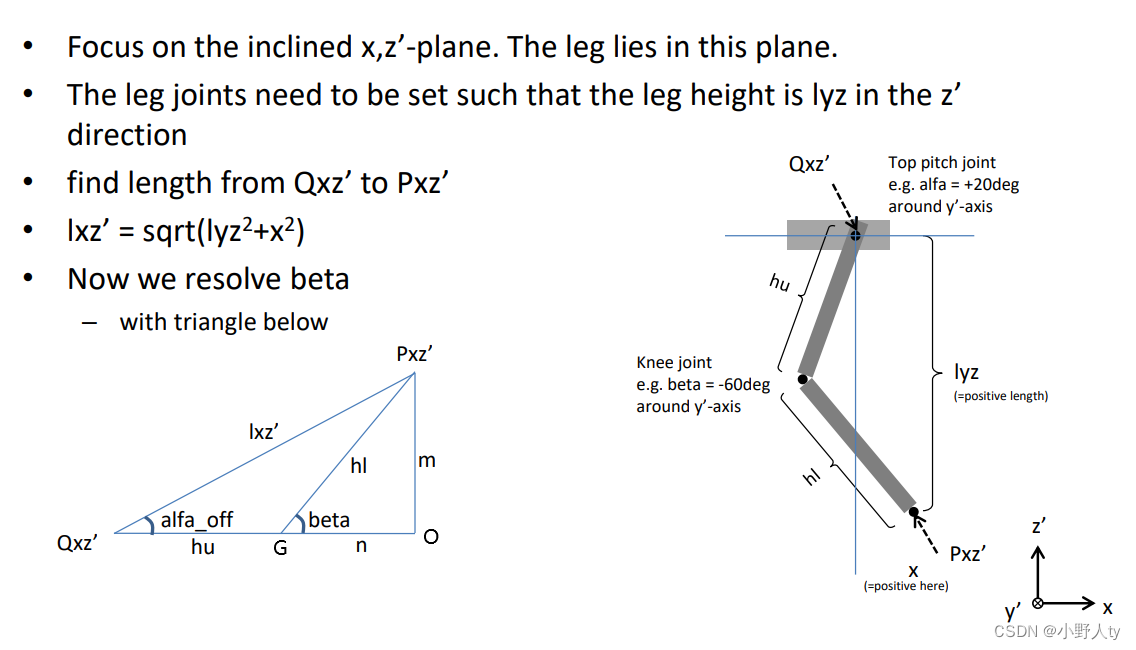
1.如下图所示,其中gamma为关节1转动角度
如图所示gamma = gamma_yz-gamma_h_offset
beta为关节2与关节3之间的转角
其中lyzd计算:
l
z
y
2
+
x
2
\sqrt{l_{zy}^2+x^2}
lzy2+x2
根据三角形
Q
x
z
′
P
x
z
′
O
Q_{xz'}P_{xz'}O
Qxz′Pxz′O勾股定理有:
m
2
+
(
h
u
+
n
)
2
=
l
x
z
′
2
m^2+(hu+n)^2=l_{xz'}^2
m2+(hu+n)2=lxz′2
三角形
O
G
P
x
z
′
OGP_{xz'}
OGPxz′勾股定理有:
m
2
+
n
2
=
h
l
2
m^2+n^2=h_l^2
m2+n2=hl2
相减可求出n,则
b
a
t
a
=
a
r
c
c
o
s
(
n
/
h
l
)
bata = arccos(n/h_l)
bata=arccos(n/hl)
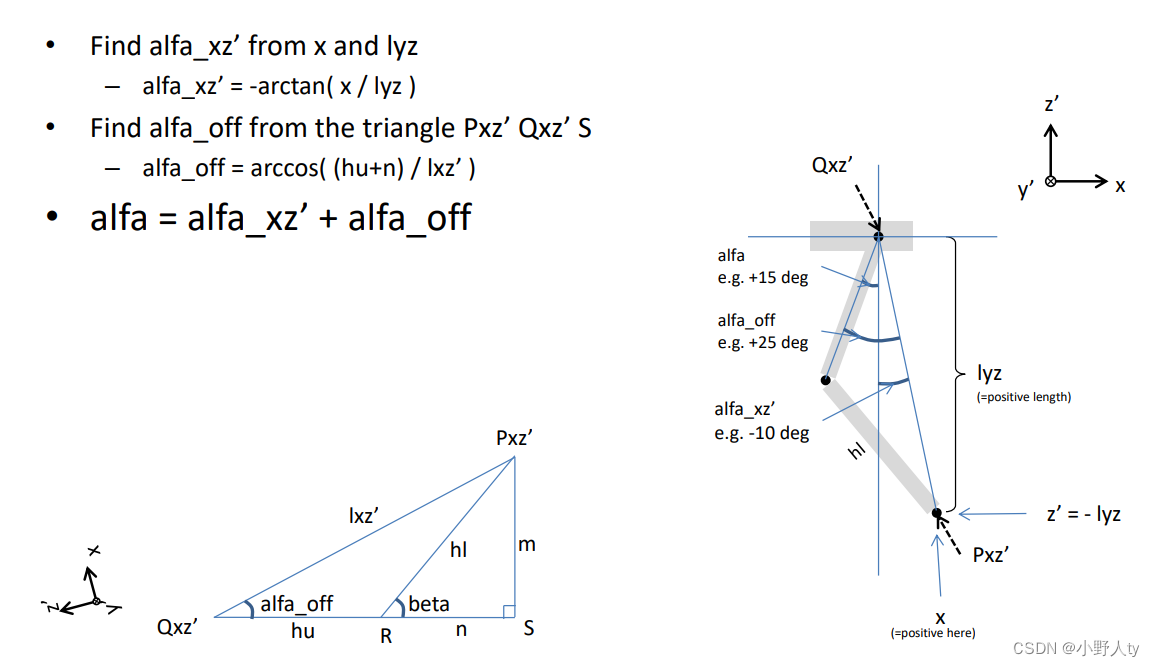
计算关节1与关节2间的alfa角:
DH法求解逆运动学可参考:
DH法求解四足机器人运动学模型














 2256
2256











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









