







 本文详述了四足机器人的腿部运动学建模,包括几何建模、正解与逆解过程。通过数学公式推导,当给定腿部位置时,使用代数方法求解关节角度θ1和θ2。特别地,逆解部分利用Python对表达式进行化简,得到θ1的计算公式,并指出实际应用中需考虑腿部初始角度的影响。
本文详述了四足机器人的腿部运动学建模,包括几何建模、正解与逆解过程。通过数学公式推导,当给定腿部位置时,使用代数方法求解关节角度θ1和θ2。特别地,逆解部分利用Python对表达式进行化简,得到θ1的计算公式,并指出实际应用中需考虑腿部初始角度的影响。
本篇将会对四足机器人的腿部进行数学建模,求解器正逆运动学解,包含详细公式推导与计算
一、运动学
不考虑横向髋关节运动时,四足机器人的腿部可以简化成二连杆机构
1、几何建模
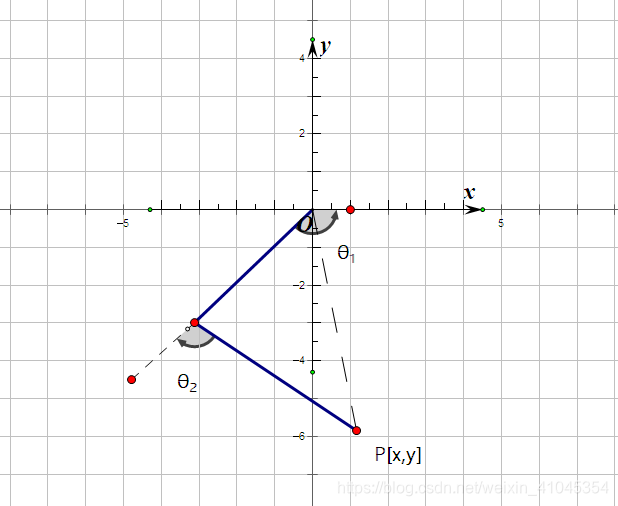
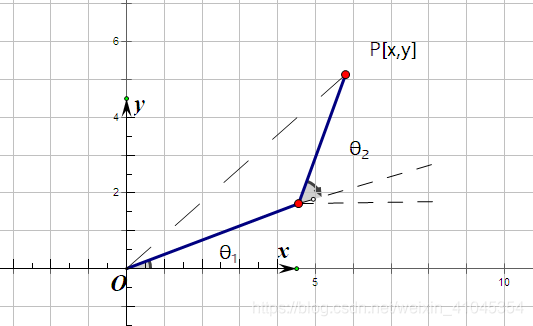
我们将位置点P摆到第一象限,以便符合我们的直觉:

2、运动学正解
如果已知 θ 1 , θ 2 \theta_1, \theta_2 θ1,θ2,可以通过下式求P[x,y]位置:
x = L 1 sin θ 1 + L 2 sin ( θ 1 + θ 2 ) x = L_1\sin\theta_1 + L_2\sin(\theta_1 + \theta_2 ) x=L1sinθ1+L2sin(θ1+θ2)
y = L 1 cos θ 1 + L 2 c o s ( θ 1 + θ 2 ) y = L_1\cos\theta_1+ L_2cos(\theta_1 + \theta_2) y=L1cosθ1+L2cos(θ1+θ2)
如果不明白上面两条公式如何来的,画一条辅助线就能够明白了,如下图:
3、逆解
已知P[x,y]位置,求 θ 1 , θ 2 \theta_1, \theta_2 θ1,θ2, 我们用代数的方法求逆解
首先两边平方相加:
x 2 + y 2 = ( l 1 s i n ( θ 1 ) + l 2 s i n ( θ 1 : + θ 2 ) ) 2 + ( l 1 c o s ( θ 1 ) + l 2 c o s ( θ 1 − θ 2 ) ) 2 x^2 + y^2 = (l_1sin(\theta_1) + l_2sin(\theta_1 :+ \theta_2))^2 + (l_1cos(\theta_1) + l_2cos(\theta_1 - \theta_2))^2 x2+y2=(l1sin(θ1)+l2sin(θ1:+θ2))2+(l1cos(θ1)+l2cos(θ1−θ2))2
将表达式展开,并写成更简洁的形式,其中 c o s θ 1 = c 1 , c o s θ 2 = c 2 cos\theta_1=c1, cos\theta_2=c2 cosθ1=c1,cosθ2=c2以此类推:
x 2 + y 2 = l 1 2 s 1 2 + 2 l 1 l 2 s 1 s 12 + l 1 2 c 1 +
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 2054
2054

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











