







一.运动学正/逆解概念
1.运动学正解:已知舵机/电机转角,求足端坐标。
2.运动学逆解:已知足端坐标,求舵机/电机转角。
二.足端轨迹规划
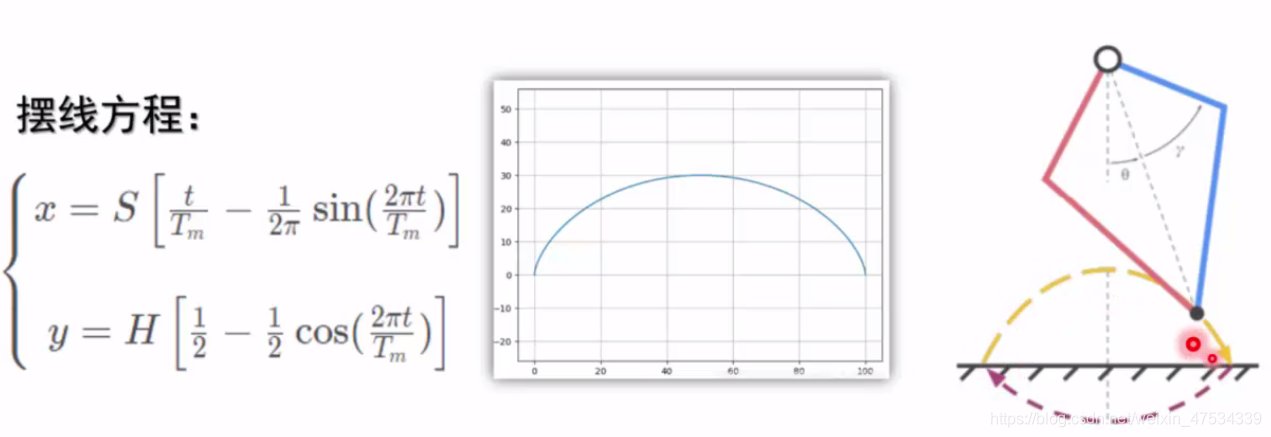
摆线方程:
{
x=r*(t-sint)
y=r*(1-cost)
[其中r为圆的半径,t是圆的半径所经过的弧度(滚动角),当t由0变到2π时,动点就画出了摆线的一支,称为一拱。]
}
所以:
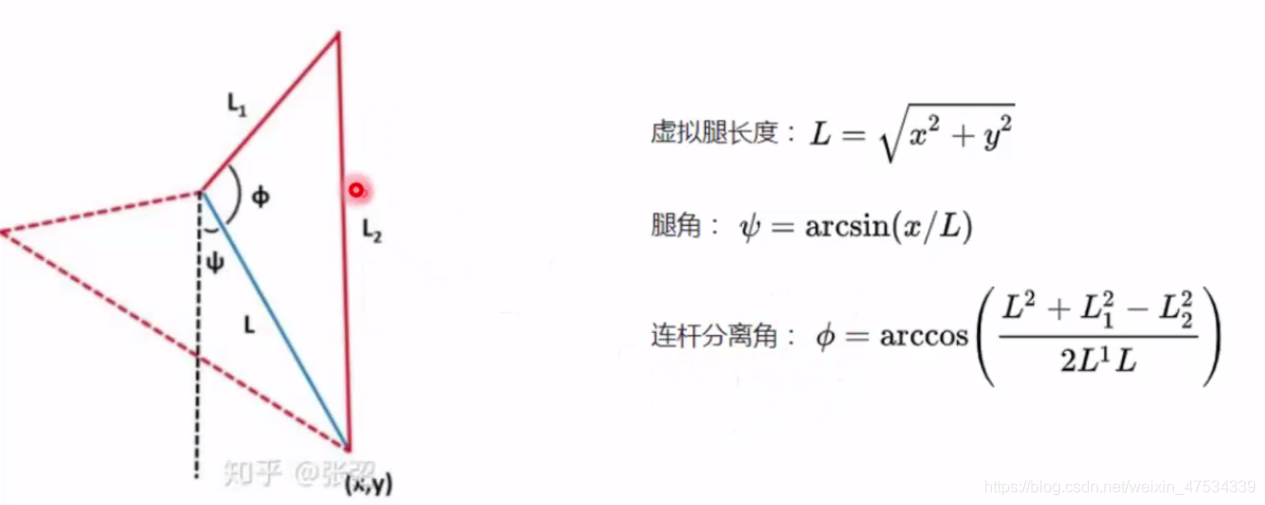
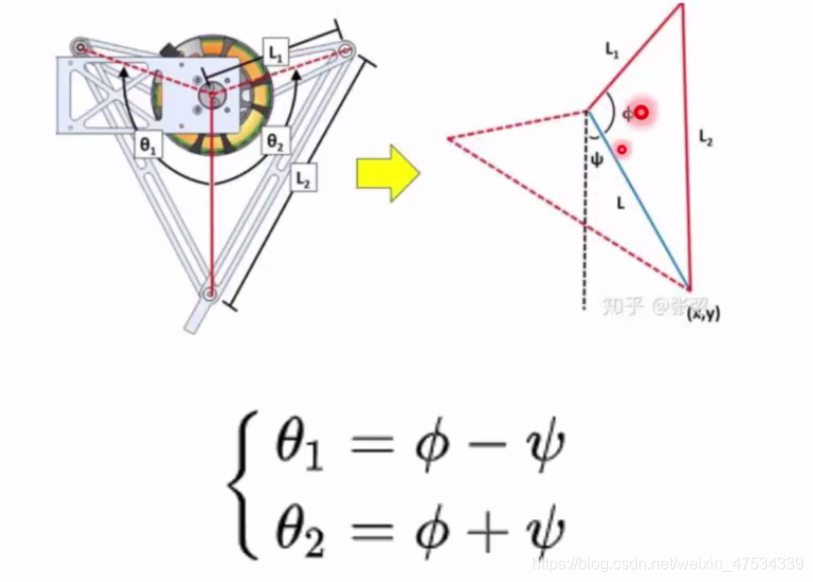
三.建立数学模型
四.作业
已知L1=35,L2=80,x=30,y=100,求θ1,θ2?
解:
将已知代入公式可得:
L=√[(30×30)/(1001×00)]≈104.4031
Ψ=arcsin(30/√10900)≈0.2914
Φ=arccos[(10900+1225-6400)/2√×10900×35]≈0.6707
θ1≈0.3793
θ2≈0.9621
注:
以上内容来自课程《斯坦福机器狗的设计与实现》,感兴趣的可以去此了解更多
(此外,如有错误,欢迎指出,非常感谢!)

















 3529
3529

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









