







前言
本文记录AD8400数字电位器调试;
一、AD8400简介
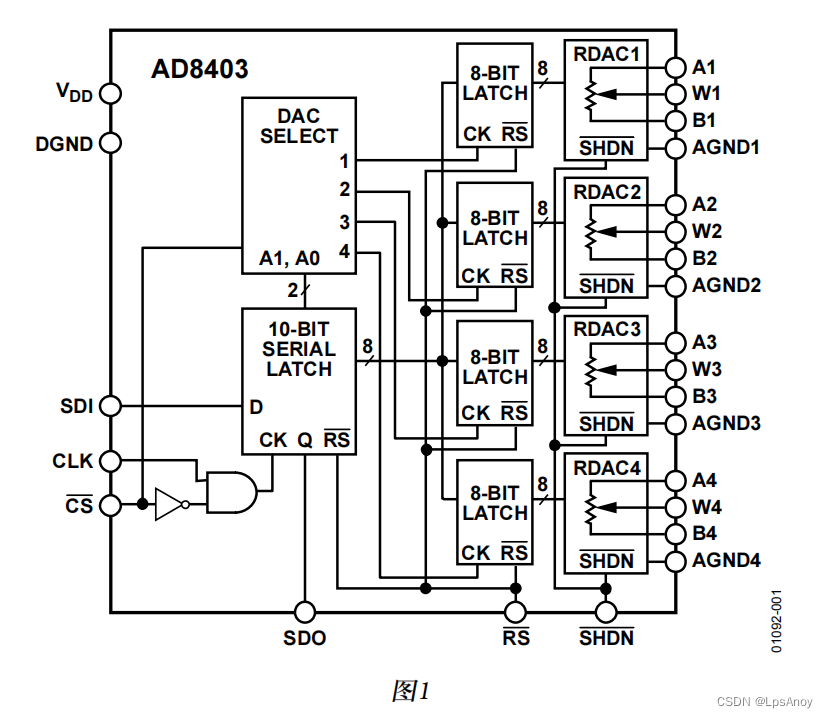
AD8400是单通道、256位、数字控制可变电阻(VR)器件,可实现与机械电位计或可变电阻相同的电子调整功能;
1.功能框图
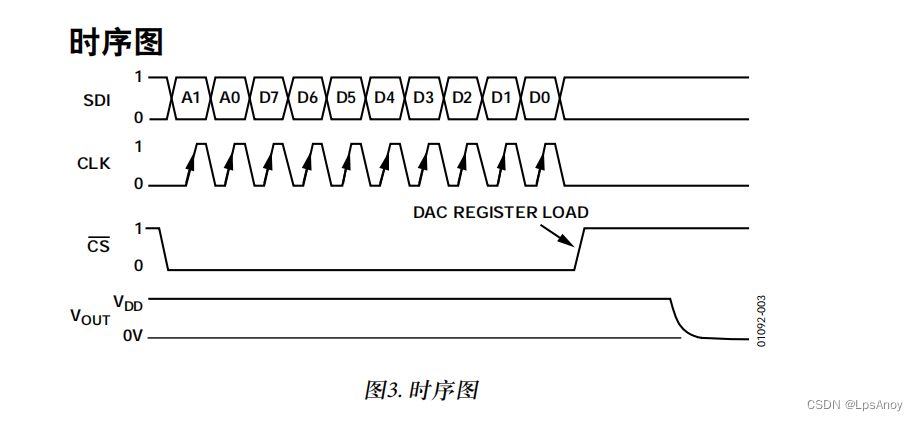
2.操作时序
二、功能测试
1.测试源码
module top (
//差分时钟
input diff_clock_clk_p,
input diff_clock_clk_n,
//input clk ,
input rst_n, // Asynchronous reset active low
// input trins,
// input[7:0] trins_data,
// input trins_rst ,
//AD8400
output reg cs ,
output reg sck,
output reg sdi,
//AGND
output ctrl_o,
//LED
output led_o
);
wire clk ;
wire[0:0] trins ;
wire[7:0] trins_data ;
reg[31:0] timer_cnt ;
reg led_reg ;
assign led_o = led_reg ;
reg[3:0] state ;
reg[15:0] sck_cnt ;
reg[4:0] data_bit ;
wire trins_rst ;
//差分转单端
IBUFGDS CLK_U(
.I(diff_clock_clk_p),
.IB(diff_clock_clk_n),
.O(clk)
);
vio_0 vio_inst0 (
.clk(clk), // input wire clk
.probe_out0({ctrl_o,trins_rst}), // output wire [0 : 0] probe_out0
.probe_out1(trins), // output wire [0 : 0] probe_out1
.probe_out2(trins_data) // output wire [7 : 0] probe_out2
);
ila_0 ila_inst (
.clk(clk), // input wire clk
.probe0({trins,cs,sck,sdi}) // input wire [3:0] probe0
);
//LED计数值
always @(posedge clk or negedge rst_n) begin : led_cnt_task
if(~rst_n) begin
timer_cnt <= 0;
end else begin
if(timer_cnt==32'd50_000_000-1) timer_cnt<= 0;
else timer_cnt <= timer_cnt + 1'b1 ;
end
end
//LED翻转
always @(posedge clk or negedge rst_n) begin : proc_led_reg
if(~rst_n) begin
led_reg <= 1;
end else begin
if(timer_cnt==32'd50_000_000-1) led_reg <= ~led_reg;
else led_reg <= led_reg ;
end
end
//CS控制
always @(posedge clk or negedge rst_n) begin : proc_cs
if(~rst_n) begin
cs <= 1;
end else begin
if(state==1) begin
cs <= 0 ;
end
else cs = 1 ;
end
end
//计数值
always @(posedge clk or negedge rst_n) begin : proc_sck_cnt
if(~rst_n) begin
sck_cnt <= 0;
end else begin
if(state==1) begin
if(sck_cnt==999) sck_cnt <= 0 ;
else sck_cnt <= sck_cnt + 1;
end
else sck_cnt <= 0;
end
end
//时钟翻转
always @(posedge clk or negedge rst_n) begin : proc_sck
if(~rst_n) begin
sck <= 0;
end else begin
if(sck_cnt==499) sck <= ~sck ;
else if(sck_cnt==999) sck <= ~sck ;
else sck <= sck;
end
end
//发送计数
always @(posedge clk or negedge rst_n) begin : proc_data_bit
if(~rst_n) begin
data_bit <= 0;
end else begin
if(state==1&&sck_cnt==999) data_bit <= data_bit + 1 ;
else if(state!=1) data_bit = 0 ;
end
end
//数据线
always @(posedge clk or negedge rst_n) begin : proc_sdi
if(~rst_n) begin
sdi <= 0;
end else begin
if(state==1) begin
if(data_bit<2) sdi <= 1'b0;
else sdi <= trins_data[7-(data_bit-2)];
end
else sdi <= 0 ;
end
end
always @(posedge clk or negedge rst_n) begin : proc_state
if(~rst_n) begin
state <= 0;
end else begin
case (state)
0:begin
if(trins) state <= 1 ;
else state <= state ;
end
1:begin
if(data_bit==10) state <= 2 ;
else state <= state ;
end
2:begin
if(trins_rst) state <= 0;
else state <= state ;
end
endcase
end
end
endmodule : top
2.仿真结果















 1118
1118











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









