







TMC5160步进电机驱动芯片
特点和优势
以下是该芯片的核心内容:
高达 20A 线圈电流的两相步进电机(外部 MOSFETs )
支持 sixPoint™的运动控制器
支持microPlyer™微步插值功能的的步进/方向接口
电压范围 8…60V 直流
SPI 和单线 UART 编码器接口和 2个参考开关输入
256 微步
stealthChop2™斩波模式,安静平滑的运行
电机中速运行的共振衰减
spreadCycle™ 高动态电机控制斩波器
dcStep™ 负载相关关速度控制
stallGuard2™ 高精度的无传感器负载检测
coolStep™ 电流控制,能量能减少 75%
被动制动和空转模式
全面保护和诊断
TMC 5160实现了TRINAMIC产品独有的高级功能。这些特征在许多步进电机应用有效的提高了精度、能效、可靠性、平滑性和能耗。
stealthChop2™ 无噪声、高精度斩波算法,用于电机的静止和运动状态下的静音控制。stealthChop2在stealthChop 的基础上,加快了电机运动加减速特性,降低的所需的电流最小值。(spreadCycle的加强版静音模式)
spreadCycle™ 高精度斩波算法,用于高动态电机运动和产生绝对干净的电流波。低噪音、低共振和低振动斩波器。(正常模式)
dcStep™ 负载相关速度控制。电机尽可能快地移动,不失步
stallGuard2™ 无传感器堵转检测和机械负载测量。
coolStep™ 根据负载自适应电流,可将能耗降低 75 %。
microPlyer™ 细分内插器,用于从全步开始,以较低分辨率步长输入获得全 256 微步的平滑度(平滑模式)
除了这些性能增强之外,TRINAMIC电机驱动器还提供了检测和防止短路输出、输出开路、过热和欠压情况的保障措施,以增强安全性和故障恢复。
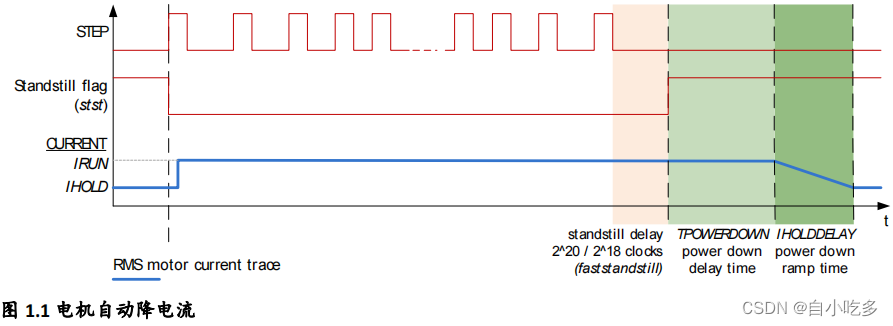
静止态自动降电流
自动电流减少大大降低了应用功耗和冷却需求。通过寄存器设置修改静态电流、延迟时间和衰减。
自动飞轮和被动制动是静止的一种选择。被动制动将电机静止功耗降低到零,同时仍然提供有效的阻尼和制动!斜坡发生器和 STEP / DIR 两个操作模式都支持一种更快检测静止的配置。
stealthChop2 & spreadCycle 驱动
stealthChop 基于电压斩波器的原理。除了电机机械滚轮轴承产生的噪音,它特别保证了电机在静止和慢动作时绝对安静。不同于其他电压模式斩波器, stealthChop2 不需要任何配置。通电后,它会在第一次运动中自动学习最佳设置,并进一步优化后续运动中的设置。初始的归零过程足以使系统完成stealthChop 最佳配置。也可以选择,通过接口预先配置初始学习参数。stealthChop2 通过对电机速度的变化立即做出反应,允许高的电机动态。
stealthChop2 & spreadCycle 驱动
stealthChop 基于电压斩波器的原理。除了电机机械滚轮轴承产生的噪音,它特别保证了电机在静止和慢动作时绝对安静。不同于其他电压模式斩波器, stealthChop2 不需要任何配置。通电后,它会在第一次运动中自动学习最佳设置,并进一步优化后续运动中的设置。初始的归零过程足以使系统完成stealthChop 最佳配置。也可以选择,通过接口预先配置初始学习参数。stealthChop2 通过对电机速度的变化立即做出反应,允许高的电机动态。
spreadCycle是周期斩波模式。它在很宽的速度和负载范围内提供平稳的操作和良好的共振阻尼。
spreadCycle方案自动集成和调节快衰减周期,以保证平滑过零性能。
stealthChop2 优势: - 显著改善了低成本电机微步性能
- 电机运行平稳安静
- 绝对没有待机噪音
- 降低机械共振产生改善的扭矩
1.7 stallGuard2 – 机械负载传感
stallguard 2提供了对电机负载的精确测量。它可以用于堵转检测,也可以用于低于使电机失步的负载下的其他用途,例如coolStep负载自适应调节电流。这提供了更多关于驱动器的信息,允许诸如无传感器归零和驱动器机械诊断之类的功能。
1.8 coolStep –负载自适应电流控制
coolstep 以最佳电流驱动电机。它根据 stallguard2 负载测量信息将电机电流调整到实际负载所需的最小量。节约了能源,降低了芯片的温度。好处是:
- 能效能效功耗降低高达 75 %
- 电机产生较少热量 提高了机械精度
- 较少或没有散热 提高了可靠性
- 使用较小的电机 减少所需的转矩→成本较低的电机完成这项工作
1.9 dcStep –负载相关速度控制
dcStep 能让电机在其负载极限和速度极限附近运行,而不失步。如果电机上的机械负载增加到堵转负载点,电机会自动降低速度,这样它仍然可以驱动负载。有了这个功能,马达将不会堵转。除了在较低速度下增加扭矩之外,动态惯性将允许电机通过减速克服机械过载。dcStep 直接与斜坡发生器集成,因此即使电机速度因机械负载增加而需要降低,也能达到目标位置。dcStep 可以在没有任何失步的情况下达到 10 倍或更大的动态范围。通过优化高负载情况下的运动速度,该功能进一步提高了整体系统效率。
dcStep 优势: - 电机在过载情况下不会失步
- 应用程序可以运行的更快
- 自动实现最高的加速度
- 在速度极限下实现最高的能效
- 全步驱动达到最高电机扭矩
- 便宜的马达便能满足应用
1.10 编码器接口
TMC5160 为外部增量编码器提供编码器接口。编码器不仅用于失步的判断,还可实现运动控制器的归零功能(替代参考开关)。可编程预分频器设置编码器分辨率以适应电机分辨率。内部包含一 32 位编码器计数器。
TMC5160工作模式
TMC5160 通过两个引脚来控制它的工作模式:SD_MODE 和 SPI_MODE。
模式 1:全功能运动控制和驱动器
所有步进电机逻辑完全在 TMC5160 内。不需要软件来控制电机 ------ 只需提供目标位置。SD_MODE 接地使能此模式(SD_MODE=0,SPI_MODE=1)。在该模式下,用户通过 SPI 接口来设置 TMC5160 的寄存器配置参数,TMC5160 使用自己的梯形曲线发生器来控制步进电机转动。
用户需要设置:开始运动速度VSTART、第一段折线末速度V1、最大速度VMAX、停止速度VSTOP、第一段折线的加速度A1、第二段折线加速度AMAX、第四段折线的减速度DMAX、第五段折线的减速度D1。
把上面的参数设置好,再设置工作模式:速度模式或位置模式。最后再设置目标位置。
如果是速度模式运行,不需要设置目标位置,电机就会开始转动。如果是位置模式,则需要设置目标位置,且目标位置与电机当前位置值不同电机才会转动。下图中的红线是电机的实际速度,不管是速度模式还是位置模式,电机的运行过程会按照下图来进行。
模式 2:脉冲和方向驱动器
像 TMC4361 这样的外部高性能 S-ramp 运动控制器或 CPU 产生与系统内其他部件(如电机) 同步的脉冲和方向信号。TMC5160 控制电流和运动模式,并反馈电机状态。 microPlyer 自动平滑运动。SD_MODE 接高电平使能此模式(SD_MODE=1,SPI_MODE=1)。在该模式下,用户通过 SPI 接口来配置 TMC5160 的寄存器。TMC5160 的功能和 DRV8825 类似,外界通过脉冲和方向引脚来控制步进电机运动。
模式 3:简单的步进和方向驱动器
TMC5160 根据步进和方向信号控制电机。microPlyer自动平滑运动,配置由硬件引脚完成。 静止保持电流控制由TMC 5160完成。可选的反馈信号作为错误检测和同步标志的输出。 SPI_MODE 接地,SD_MODE 接高电平使能此模式(SD_MODE=1,SPI_MODE=0)。在该模式下,SPI 接口失能,TMC5160 的工作状态由 CFG 引脚配置。TMC5160 可以完全独立工作,不需要接 CPU。
标准电路图连接

TMC5160中文芯片手册PDF-带书签
https://download.csdn.net/download/hxkrrzq/11217181


















 408
408

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











