








做项目时用到ABB机器人,直接通过ABB内置的函数可以轻松实现四元数读数与欧拉角的相互转化。但实际项目需要从示教器读出相关位置并自行计算,尤其需要计算旋转矩阵。
本文以ABB IRB120机器人(不确定其他机器人是否与ABB机器人一致)为例如下姿态为例来描述上述几个量的计算。
图1 机器人在Robot studio中的姿态
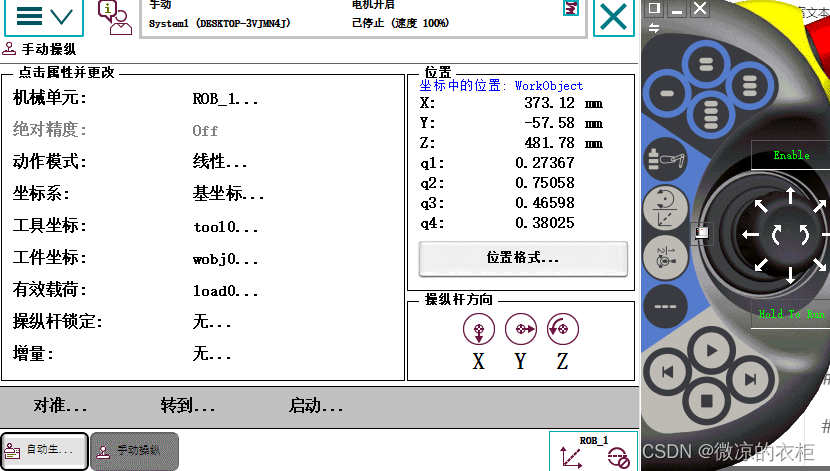
图2 示教器中四元数读数
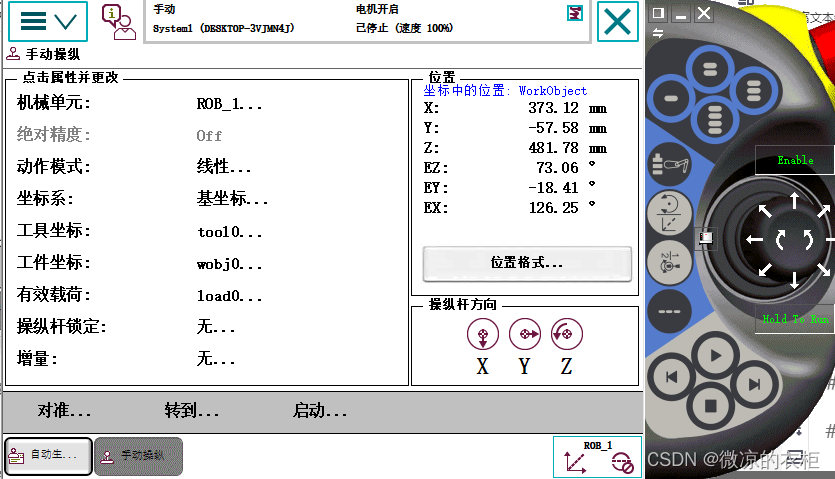
图3 示教器中欧拉角读数
值得注意的是,ABB机器人的欧拉角是ZYX欧拉角。
1. 求旋转矩阵
(1) 已知四元数求旋转矩阵
此处给出matlab代码:
q=[0.27367, 0.75058, 0.46598, 0.38025];
fprintf('Quaternion rotation matrix: \n');
disp(Rotation(q));
function R = Rotation(Q)
Q = Q./sqrt(sum(Q.*Q));
q0 = Q(1); q1 = Q(2); q2 = Q(3); q3 = Q(4);
R = [q0^2 + q1^2 - q2^2 - q3^2, 2*(q1*q2 - q0*q3), 2*(q1*q3 + q0*q2);
2*(q1*q2 + q0*q3), q0^2 - q1^2 + q2^2 - q3^2, 2*(q2*q3 - q0*q1);
2*(q1*q3 - q0*q2), 2*(q2*q3 + q0*q1), q0^2 - q1^2 - q2^2 + q3^2;
];
end
结果为:
Quaternion rotation matrix:
0.2765 0.4914 0.8259
0.9076 -0.4159 -0.0564
0.3158 0.7652 -0.5610
(2) 已知欧拉角求旋转矩阵
此处用到了Matlab Robotics Toolbox工具箱,这是一个机器人仿真和建模非常好用的工具箱,以下给出安装链接:
Matlab Robotics Toolbox工具箱安装教程
1.https://www.bilibili.com/read/cv14423551
2.https://petercorke.com/toolboxes/robotics-toolbox/
以下为matlab代码:
fprintf('Euler rotation matrix: \n');
disp(rotz(73.06,'deg')*roty(-18.41, 'deg')*rotx(126.25, 'deg'));
其中rotx,roty, rotz为Matlab Robotics Toolbox工具箱中的函数。
结果为:
Euler rotation matrix:
0.2765 0.4914 0.8259
0.9077 -0.4159 -0.0563
0.3158 0.7652 -0.5610
可以看到采用四元数与欧拉角算得的旋转矩阵一致(有细微的差别,推测来源于小数截断)。
2. 欧拉角、旋转矩阵与四元数转换
(1) 欧拉角转四元数
此处推荐一个python库transformations,安装方法:
pip install transformations
库的github链接:
https://github.com/cgohlke/transformations
直接调用库中函数即可实现转换,以下给出python代码:
import transformations
import numpy
import math
def euler(roll, pitch, yaw, axes='rzyx'):
yaw = float(yaw) / 180 * numpy.pi
pitch = float(pitch) / 180 * numpy.pi
roll = float(roll) / 180 * numpy.pi
return list(transformations.quaternion_from_euler(roll, pitch, yaw, axes=axes))
roll = 73.06#Ez
pitch = -18.41#Ey
yaw = 126.25#Ex
quaternion = euler(roll, pitch, yaw)
print(quaternion)
结果为:
[0.27362606284972685, 0.7505716495097842, 0.46601038304769293, 0.380270035071476]
此处也手动实现了欧拉角到四元数的转换,代码如下:
def self_euler_quaternion(roll, pitch, yaw):
yaw = float(yaw) / 180 * numpy.pi
pitch = float(pitch) / 180 * numpy.pi
roll = float(roll) / 180 * numpy.pi
r, p, y = roll/2, pitch/2, yaw/2
sinr, sinp, siny = math.sin(r), math.sin(p), math.sin(y)
cosr, cosp, cosy = math.cos(r), math.cos(p), math.cos(y)
q0 = cosr * cosp * cosy + sinr * sinp * siny
q3 = sinr * cosp * cosy - cosr * sinp * siny
q2 = cosr * sinp * cosy + sinr * cosp * siny
q1 = cosr * cosp * siny - sinr * sinp * cosy
return numpy.array([q0, q1, q2, q3])
roll = 73.06#Ez
pitch = -18.41#Ey
yaw = 126.25#Ex
quaternion = euler(roll, pitch, yaw)
print(self_euler_quaternion(roll, pitch, yaw))
结果为:
[0.27362606 0.75057165 0.46601038 0.38027004]
可以看到,与示教器上的结果基本一致。
(2) 旋转矩阵转四元数
给出如下matlab代码:
function q = vgg_quat_from_rotation_matrix( R )
% vgg_quat_from_rotation_matrix Generates quaternion from rotation matrix
% q = vgg_quat_from_rotation_matrix(R)
q = [ (1 + R(1,1) + R(2,2) + R(3,3)) (1 + R(1,1) - R(2,2) - R(3,3)) (1 - R(1,1) + R(2,2) - R(3,3)) (1 - R(1,1) - R(2,2) + R(3,3)) ];
%if ~issym(q)
A = true;
if ~A
% Pivot to avoid division by small numbers
[b I] = max(abs(q));
else
% For symbolic quats, just make sure we're nonzero
for k=1:4
if q(k) ~= 0
I = k;
break
end
end
end
q(I) = sqrt(q(I)) / 2 ;
if I == 1
q(2) = (R(3,2) - R(2,3)) / (4*q(I));
q(3) = (R(1,3) - R(3,1)) / (4*q(I));
q(4) = (R(2,1) - R(1,2)) / (4*q(I));
elseif I==2
q(1) = (R(3,2) - R(2,3)) / (4*q(I));
q(3) = (R(2,1) + R(1,2)) / (4*q(I));
q(4) = (R(1,3) + R(3,1)) / (4*q(I));
elseif I==3
q(1) = (R(1,3) - R(3,1)) / (4*q(I));
q(2) = (R(2,1) + R(1,2)) / (4*q(I));
q(4) = (R(3,2) + R(2,3)) / (4*q(I));
elseif I==4
q(1) = (R(2,1) - R(1,2)) / (4*q(I));
q(2) = (R(1,3) + R(3,1)) / (4*q(I));
q(3) = (R(3,2) + R(2,3)) / (4*q(I));
end
end
测试代码为:
vgg_quat_from_rotation_matrix(rotz(95.03,'deg')*roty(-18.37, 'deg')*rotx(174.57, 'deg'))
结果为:
0.0860 -0.6716 -0.7221 -0.1422
与示教器结果一致。
(3) 四元数转欧拉角
由于项目暂时没有这个需求,因此这部分没有实现,感兴趣的小伙伴可以提供相关代码。
(4) 旋转矩阵转欧拉角
旋转矩阵到欧拉角的转换公式
假设旋转矩阵 (\mathbf{R}) 是:
R
=
[
cos
(
θ
y
)
cos
(
θ
z
)
sin
(
θ
x
)
sin
(
θ
y
)
cos
(
θ
z
)
−
sin
(
θ
z
)
cos
(
θ
x
)
sin
(
θ
x
)
sin
(
θ
z
)
+
sin
(
θ
y
)
cos
(
θ
x
)
cos
(
θ
z
)
sin
(
θ
z
)
cos
(
θ
y
)
sin
(
θ
x
)
sin
(
θ
y
)
sin
(
θ
z
)
+
cos
(
θ
x
)
cos
(
θ
z
)
−
sin
(
θ
x
)
cos
(
θ
z
)
+
sin
(
θ
y
)
sin
(
θ
z
)
cos
(
θ
x
)
−
sin
(
θ
y
)
sin
(
θ
x
)
cos
(
θ
y
)
cos
(
θ
x
)
cos
(
θ
y
)
]
R = \begin{bmatrix} \cos(\theta_y) \cos(\theta_z) & \sin(\theta_x) \sin(\theta_y) \cos(\theta_z) - \sin(\theta_z) \cos(\theta_x) & \sin(\theta_x) \sin(\theta_z) + \sin(\theta_y) \cos(\theta_x) \cos(\theta_z) \\ \sin(\theta_z) \cos(\theta_y) & \sin(\theta_x) \sin(\theta_y) \sin(\theta_z) + \cos(\theta_x) \cos(\theta_z) & -\sin(\theta_x) \cos(\theta_z) + \sin(\theta_y) \sin(\theta_z) \cos(\theta_x) \\ -\sin(\theta_y) & \sin(\theta_x) \cos(\theta_y) & \cos(\theta_x) \cos(\theta_y) \end{bmatrix}
R=
cos(θy)cos(θz)sin(θz)cos(θy)−sin(θy)sin(θx)sin(θy)cos(θz)−sin(θz)cos(θx)sin(θx)sin(θy)sin(θz)+cos(θx)cos(θz)sin(θx)cos(θy)sin(θx)sin(θz)+sin(θy)cos(θx)cos(θz)−sin(θx)cos(θz)+sin(θy)sin(θz)cos(θx)cos(θx)cos(θy)
R = [ r 11 r 12 r 13 r 21 r 22 r 23 r 31 r 32 r 33 ] \mathbf{R} = \begin{bmatrix} r_{11} & r_{12} & r_{13} \\ r_{21} & r_{22} & r_{23} \\ r_{31} & r_{32} & r_{33} \end{bmatrix} R= r11r21r31r12r22r32r13r23r33
XYZ顺序的欧拉角
-
计算 (\theta_y)(绕y轴的旋转角度):
θ y = arctan 2 ( − r 31 , r 11 2 + r 21 2 ) \theta_y = \arctan2(-r_{31}, \sqrt{r_{11}^2 + r_{21}^2}) θy=arctan2(−r31,r112+r212) -
检查奇异性:
奇异性条件是 (\sqrt{r_{11}^2 + r_{21}^2} < 1e-6)。 -
如果不处于奇异状态,计算 (\theta_x) 和 (\theta_z):
-
计算 (\theta_x)(绕x轴的旋转角度):
θ x = arctan 2 ( r 32 , r 33 ) \theta_x = \arctan2(r_{32}, r_{33}) θx=arctan2(r32,r33) -
计算 (\theta_z)(绕z轴的旋转角度):
θ z = arctan 2 ( r 21 , r 11 ) \theta_z = \arctan2(r_{21}, r_{11}) θz=arctan2(r21,r11)
-
-
如果处于奇异状态,采用备用公式计算 (\theta_x) 和 (\theta_z):
-
计算 (\theta_x)(绕x轴的旋转角度):
θ x = arctan 2 ( − r 12 , r 22 ) \theta_x = \arctan2(-r_{12}, r_{22}) θx=arctan2(−r12,r22) -
计算 (\theta_z)(绕z轴的旋转角度):
θ z = 0 \theta_z = 0 θz=0
-
ZYX顺序的欧拉角
-
计算 (\theta_y)(绕y轴的旋转角度):
θ y = arctan 2 ( r 31 , r 11 2 + r 21 2 ) \theta_y = \arctan2(r_{31}, \sqrt{r_{11}^2 + r_{21}^2}) θy=arctan2(r31,r112+r212) -
检查奇异性:
奇异性条件是 (\sqrt{r_{11}^2 + r_{21}^2} < 1e-6)。 -
如果不处于奇异状态,计算 (\theta_x) 和 (\theta_z):
-
计算 (\theta_x)(绕x轴的旋转角度):
θ x = arctan 2 ( − r 32 , r 33 ) \theta_x = \arctan2(-r_{32}, r_{33}) θx=arctan2(−r32,r33) -
计算 (\theta_z)(绕z轴的旋转角度):
θ z = arctan 2 ( − r 21 , r 11 ) \theta_z = \arctan2(-r_{21}, r_{11}) θz=arctan2(−r21,r11)
-
-
如果处于奇异状态,采用备用公式计算 (\theta_x) 和 (\theta_z):
-
计算 (\theta_x)(绕x轴的旋转角度):
θ x = arctan 2 ( r 12 , r 22 ) \theta_x = \arctan2(r_{12}, r_{22}) θx=arctan2(r12,r22) -
计算 (\theta_z)(绕z轴的旋转角度):
θ z = 0 \theta_z = 0 θz=0
-
代码实现
上述公式可以使用Python代码实现如下:
import numpy as np
# 给定旋转矩阵
R = np.array([
[0.9994, 0.0359, -0.0025],
[-0.036, 0.9961, -0.081],
[-0.004, 0.0811, 0.9967]
])
# 计算欧拉角(XYZ顺序)
def rotation_matrix_to_euler_angles_xyz(R):
sy = np.sqrt(R[0, 0] * R[0, 0] + R[1, 0] * R[1, 0])
singular = sy < 1e-6
if not singular:
x = np.arctan2(R[2, 1], R[2, 2])
y = np.arctan2(-R[2, 0], sy)
z = np.arctan2(R[1, 0], R[0, 0])
else:
x = np.arctan2(-R[1, 2], R[1, 1])
y = np.arctan2(-R[2, 0], sy)
z = 0
return np.array([x, y, z])
# 计算欧拉角(ZYX顺序)
def rotation_matrix_to_euler_angles_zyx(R):
sy = np.sqrt(R[0, 0] * R[0, 0] + R[1, 0] * R[1, 0])
singular = sy < 1e-6
if not singular:
y = np.arctan2(R[2, 0], sy)
x = np.arctan2(-R[2, 1], R[2, 2])
z = np.arctan2(-R[1, 0], R[0, 0])
else:
x = np.arctan2(R[1, 2], R[1, 1])
y = np.arctan2(R[2, 0], sy)
z = 0
return np.array([x, y, z])
# 获取以弧度表示的欧拉角
euler_angles_xyz_rad = rotation_matrix_to_euler_angles_xyz(R)
euler_angles_zyx_rad = rotation_matrix_to_euler_angles_zyx(R)
# 转换为角度
euler_angles_xyz_deg = np.degrees(euler_angles_xyz_rad)
euler_angles_zyx_deg = np.degrees(euler_angles_zyx_rad)
euler_angles_xyz_deg, euler_angles_zyx_deg
3. 总结
本文以ABB IRB120机器人为例,给出了通过四元数、欧拉角计算旋转矩阵以及四元数到欧拉角的转换代码,实测与示教器的结果一致,相关代码可直接用于工程上坐标转换。

















 1912
1912

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









