






自动驾驶汽车,这个一度只存在于科幻小说和电影中的概念,如今已逐渐走进我们的日常生活。作为自动驾驶技术的佼佼者,Apollo 自动驾驶技术吸引了全球的关注。作为一个对科技充满好奇的普通人,我决定深入了解 Apollo 技术背后的原理,探索它如何将科幻变为现实。
一、传感器:感知周围环境的“眼睛”

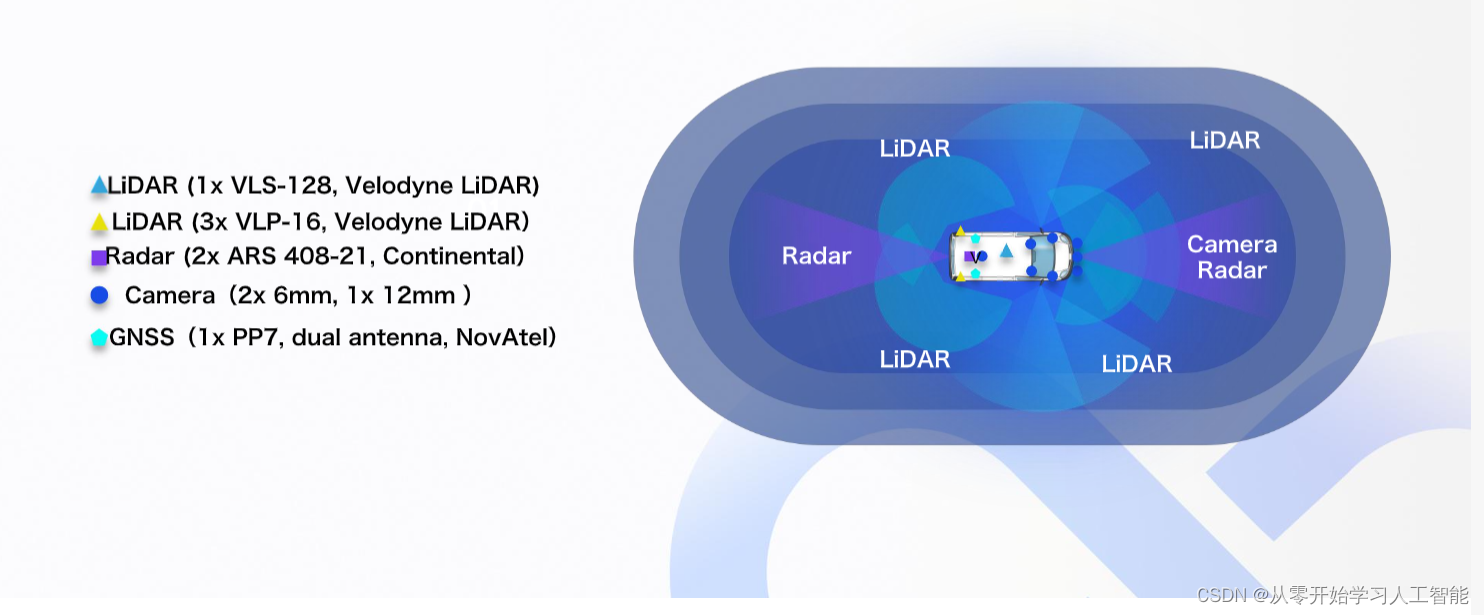
传感器是自动驾驶汽车的关键组件之一,它们充当着“眼睛”的角色,帮助车辆感知周围环境。Apollo 自动驾驶技术使用了多种传感器,包括激光雷达、摄像头、毫米波雷达等。这些传感器从不同的角度收集数据,相互补充,为车辆提供全面的环境感知。
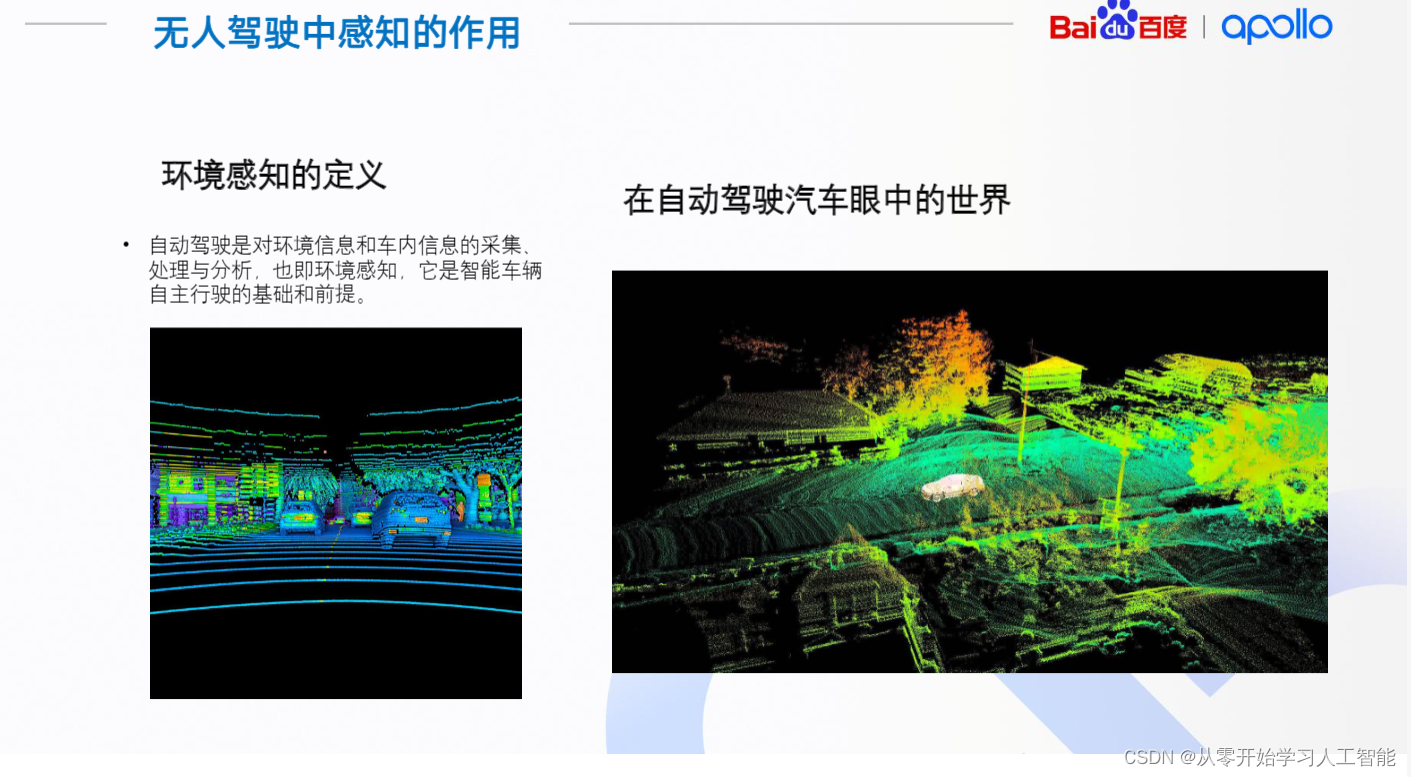
激光雷达通过向周围环境发射激光束并测量反射回来的时间,生成周围环境的详细三维地图。摄像头则可以识别颜色、纹理和形状,有助于识别交通信号、车辆、行人等。毫米波雷达具有较好的穿透性和抗干扰能力,能够全天候工作,主要用于距离和速度的测量。
二、定位与导航:确定“我在哪里”
定位与导航是自动驾驶汽车的基本功能。Apollo 技术使用了 GPS、IMU(Inertial Measurement Unit,惯性测量单元)、轮速传感器等多种技术,实现高精度定位。通过接收来自 GPS 和其他卫星的信号,自动驾驶汽车可以精确定位自身位置。IMU 则通过陀螺仪和加速度计等传感器,提供车辆的姿态和运动信息,帮助车辆在复杂环境中进行精确导航。
三、路径规划:决定“我去哪里”
路径规划是自动驾驶技术的核心之一。Apollo 技术使用了一种基于概率的路径规划算法,该算法考虑了各种可能的驾驶行为和交通情况,为车辆选择最优路径。同时,Apollo 还集成了高精度地图数据,为车辆提供详细的道路信息和交通规则,确保车辆在行驶过程中遵守交通规则并避免潜在危险。
四、控制:让汽车按照规划的路径行驶
控制是自动驾驶技术的另一个关键环节。Apollo 技术使用了一套复杂的控制系统,根据路径规划结果和车辆状态信息,实时调整车辆的油门、刹车和转向等参数,使车辆按照规划的路径行驶。这套控制系统还考虑了车辆动力学和运动学特性,确保车辆在行驶过程中保持稳定并避免潜在的碰撞风险。

五、总结
通过深入了解 Apollo 自动驾驶技术原理,我对科技的神奇与魅力有了更深刻的认识。自动驾驶汽车并不仅仅是单一技术的突破,而是传感器、定位、导航、路径规划和控制等多个领域技术的完美结合。作为一名普通人,虽然我们可能无法参与到这种高精尖的技术研发中,但保持好奇心和学习欲望,我们可以成为这场科技革命的见证者和参与者。在未来的日子里,我期待着看到更多像 Apollo 这样的技术改变我们的生活。
















 3375
3375

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











