






以一个算例来谈——On/Off Control of a Thermal Actuator。
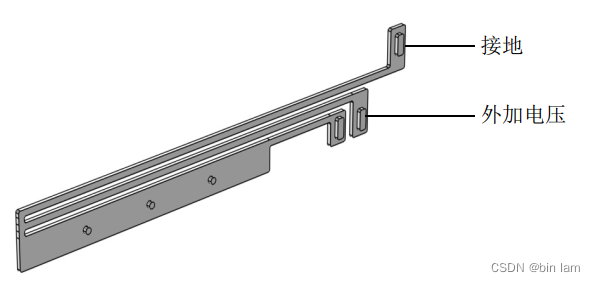
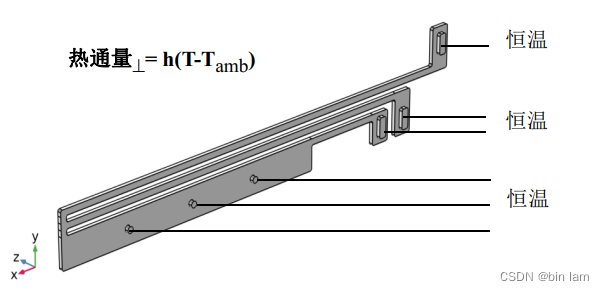
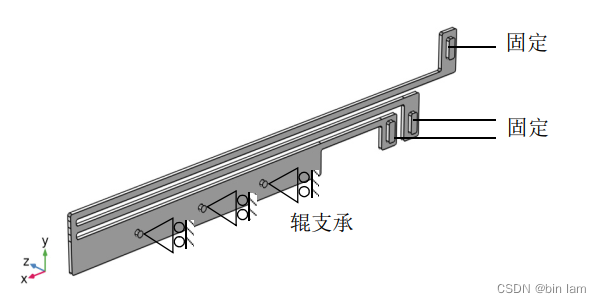
先阐述物理背景,这是一个MEMS领域里的热执行器,作用就是通过焦耳热使多晶硅材料的热臂发生结构变形,从而产生特定范围内的位移得到控制的目的。此模型有三种物理场的耦合,电流、固体传热和固体力学,三种物理场的边界条件发别如下图所示。后面谈此算例comsol部分和simulink部分主要的一些重点难点。
COMSOL部分
(1)几何节点。运用了“编程”选项里的“If-if end”语句,定义了参数noa,用于臂的选择,noa=2的几何为2臂,noa=3几何为3臂;此外,几何里运用了“显式”选项,方便于后面物理场边界条件的定义,统一边界,免于手动点边界时出现错误,树下面的“累积选择“是从“显式”衍生出来的,会根据noa数值的不同而不同。关于几何节点里的内容主要是这些,其它的建模手法都是中规中矩的;
(2)材料节点。此算例材料选择的是”Polysilicon“多晶硅,物理场计算所需的所有物理属性软件内置里都有,无需手动添加,如果需要自己定义一些物理属性,也不难,自己定义一个相关的函数,填进相关物理属性的表达式内;
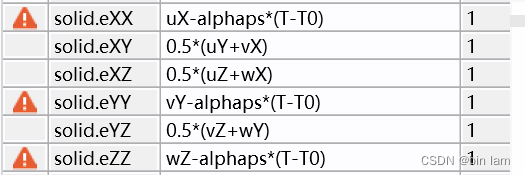
(3)物理场节点。总共有三个物理场的耦合,分别为”Electric Currents“、”Heat Transfer in Solids“、”Solid Mechanics“,其它设置都中规中矩,主要是”Solid Mechanics“下,加了阻尼,同时在方程里面添加了以T为自变量的线性应变,与热膨胀系数相关,如下有警示的三个方程;
(4)至于在所有物理场的边界设置时,定义几何时进行的显式选择的便利在这里体现出来了;
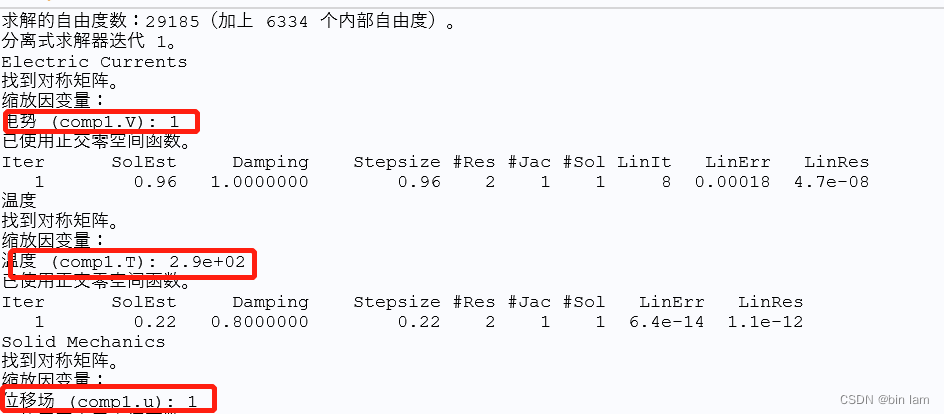
(5)研究节点。稳态求解时的”几何非线性“的勾选问题,当有大的位移、旋转和变形等,eeff>6-10%时,需要勾选,而如果是简化的,位移小的模型,可以不勾选,勾选后计算量和鲁棒性会有所增加;瞬态计算环节,在因变量时运用了缩放,进行Newton-Raphson 迭代,如果知道求解变量的峰值范围,可以手动设置,这样可以减少迭代次数,解决浮点算法有限精度的问题,注意,缩放比例量级不能小于结果峰值太多,否则会出现数值计算错误,如果不知道就无需设置,至于迭代时的缩放比例可在日志里看到,如下图;
(6)其它。此算例中,进行一些几何参数和物性参数的定义、”探针“定义、非局部耦合的”最大值“定义,此文主要是谈论后两者。"探针"定义了固体力学里的v方向的变形位移,位置选在端点处,”最大值”定义了整个计算里的最大温度,这两者也是用作与simulink联合仿真时的输出变量,表达式可直接运用,这个可继续往后看与simulink联合的部分。
至此,关于COMSOL的部分,毕。后面展开simulink的部分。
Simulink部分
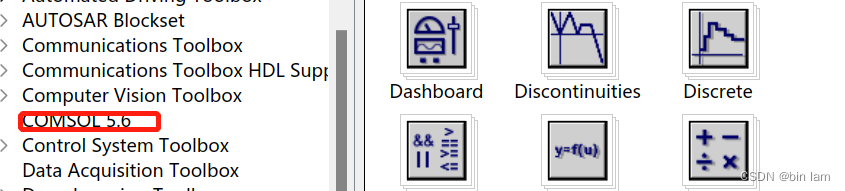
(1)首先是软件安装时的接口需要勾选,添加matlab安装时的绝对路径,之后会有下图所示的程序。运行此程序,会自动打开matlab,然后打开simulink,最后所有的文件都保存在一个文件夹。
(2)在comsol的研究选项里添加“Cosimulation for Simulink”,在和simulink进行交互之前,需要建个.fmu文件,用于两者的通讯。之后设置输入参数和输出参数,后面comsol的整个模型会以封装的形式出现在simulink中,而输入参数为“in”,输出参数为“out”,此封装模块可直接在Library Browser里找到 。关于在comsol里设置的输入输出变量,探针名可直接引用,而封装的图像可用任何一张图;
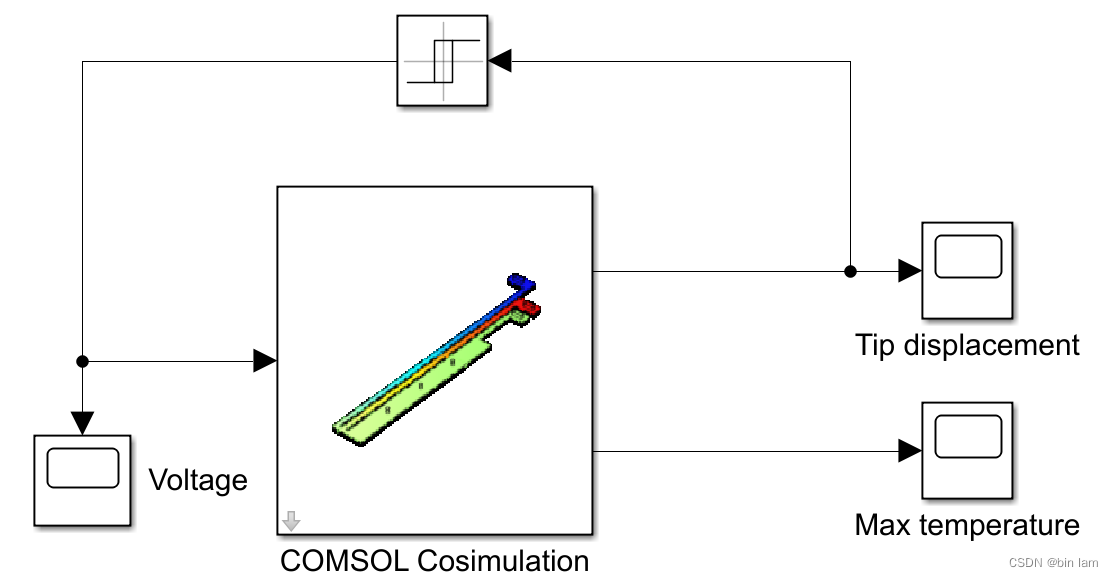
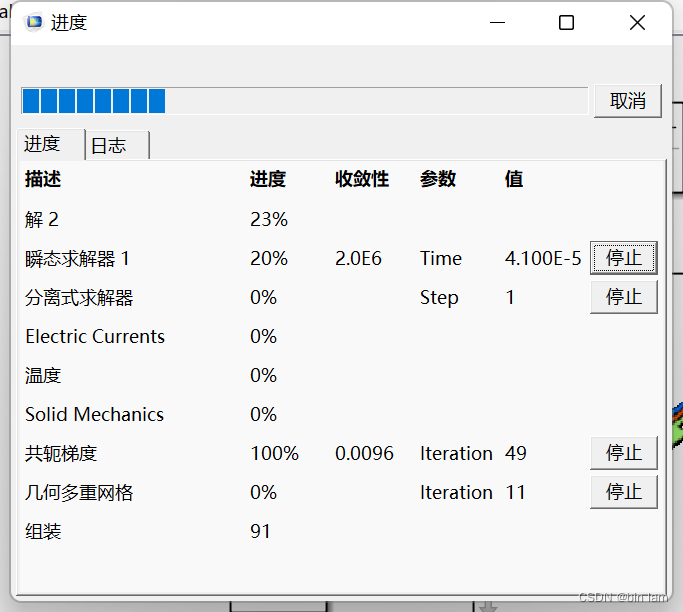
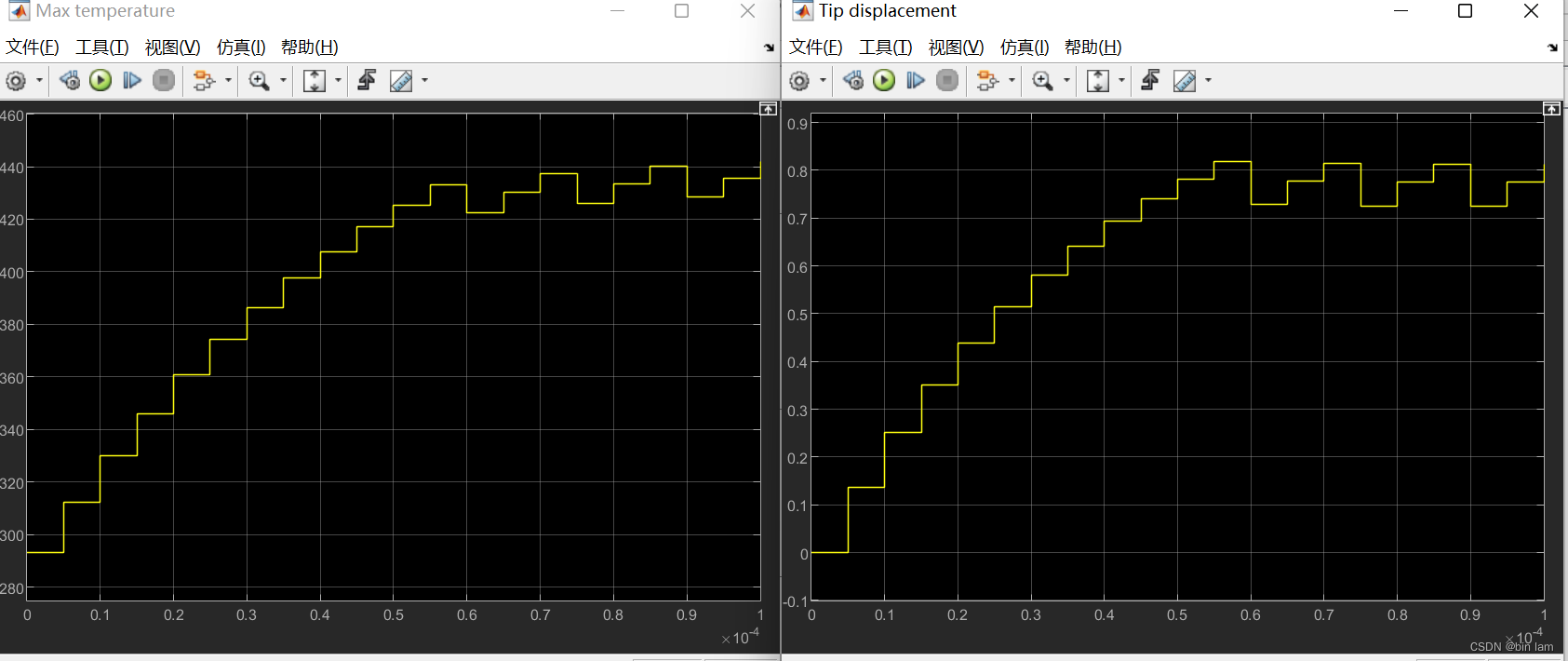
(3)在simulink里此算例用到了relay这个模块,这是个带有缓冲区的开关,此算例中,位移大于0.81时,开关开,电压为0;位移小于0.79时,开关关,电压为5;而位移处于中间缓冲区时,保持上一阶段的值。整个联合仿真过程,会有日志记录每个迭代的细节。
(4)计算结果可用“first order hold”对结果做平滑处理,或者把交互时间步设置小些。最后位移和温度都控制在一定的区间内。
最后分享算例
COMSOL Multiphysics with Simulink联合仿真 https://download.csdn.net/download/weixin_41678956/86967952
https://download.csdn.net/download/weixin_41678956/86967952

















 1235
1235

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









