







1 点位控制原理简介
机器人控制可以分为关节空间的控制和笛卡尔空间的控制。对于串联式多关节机器人,关节空间的控制是针对机器人各个关节的变量进行的控制,笛卡尔空间控制是针对机器人末端的变量进行的控制。按照控制量的不同,机器人控制可以分为:位置控制、速度控制、加速度控制、力控制、力位混合控制和振动控制等。
按作业任务的不同,机器人的控制方式则可分为点位控制、连续轨迹控制、力(力矩)控制和智能控制四种控制方式。
工业机器人的点位控制方式是通过对机器人的运行轨迹进行点位设置,以控制机器人的位姿作为主要内容。技术人员根据机器人的工作任务对位姿进行调整以此来保证机器人的精确位置,进而让机器人在精准的位置上高效率地完成工作任务。点位控制方式仅控制机器人的末端执行器,关键是控制机器人的位置,通过点位控制机器人,确保机器人能够在相应位置精准、快速地完成指定操作任务。
点位控制原理是,一个定位命令要求主轴和与零件移动到另一个位置时,模块先计算一个理论的时间速度图。然后以这个时间速度图控制轴,使之最后达到规定的位置。典型的时间速度图是个梯形,也就是说,轴先以用户设定的家属度匀加速运动,直至达到用户设定速度,然后匀速运动一定的时间,再以用户设定的加速度做匀减速运动,直到速度变为0。速度达到0时,轴移动的距离正好是命令规定的值。
在控制轴运动到固定位置之前,需要先通过计算等方式确定固定点的位置,即需要提前实现定位功能。常见的点位方式有计算机视觉定位、激光测距定位、导航定位等等。其中激光测距定位的方式主要有两种,第一种原理是依据光速和往返时间的乘积来计算测距仪和被测量物体之间的距离,以激光测距仪为例;第二种是使用激光测距传感器来测算距离,目前激光测距传感器的测试精度可以达到 1μm,已经被广泛应用于各个领域。
2 激光测距传感器设计
- 硬件设计
激光传感器采用相位法激光测距技术,通过激光传感器发射无线电波段频率的激光进行幅度调制,并将正弦调制光往返测距仪与目标物间距离所产生的相位差测定,根据调制光的波长和频率,计算出激光的飞行时间,再计算出待测的距离。
- 标定方法
由于本文的设计装置安装在户外环境,太阳光照强度的变化容易对激光测距传感器的测距结果造成影响,带来误差。为了减小因光照强度影响带来的误差,激光测距传感器通过监测补偿法来降低太阳光照强度的影响。而引起误差的原因不仅仅是太阳光照强度,还有可能是激光测距传感器摆放位置,为了减小误差对最终监测结果的影响,可以通过最小二乘法对误差参数进行拟合。
3 机器人剥线系统
为实现变姿态剥线过程的实时剥线位置跟踪,该项目将设计一款机器人剥线系统。将线式激光传感器安装在机器人的法兰盘上,且位于剥线装置运行的前方。剥线过程中,激光传感器连续采集剥线位置信息,并结合手眼标定矩阵以及机器人实时姿态,将传感器采集的剥线坐标转换到机器人基础坐标系下,从而形成空间绝对剥线轨迹; 再根据剥线装置的当前位置与剥线位置的空间绝对轨迹生成位置偏差。将位置偏差变换到剥线装置工具坐标系下进行实时修正。
使用该机器人剥线系统实现剥线机器人针对变姿态剥线过程的连续跟踪,跟踪过程平滑光顺,跟踪整体精度高。基本满足剥线实时跟踪应用的一般要求。
1机器人剥线系统
项目设计的机器人剥线系统主要由六自由度机械臂、线激光测距传感器、剥线机器人以及剥线装置组成,系统结构原理如图 1 所示。从图中可以看出激光传感器实时采集剥线位置数据,并将位置信息通过 Transmission Control Protocol( TCP) 发送给传感器控制器完成偏差量的计算,再将计算结果通过 TCP 返回给机器人控制器,从而实现剥线机器人相对剥线位置的实时修正。
该系统是一个典型的闭环控制系统,激光测距传感器以及剥线位置跟踪算法构成其中的反馈环节,因此,对于实现良好的自动化剥线过程至关重要。
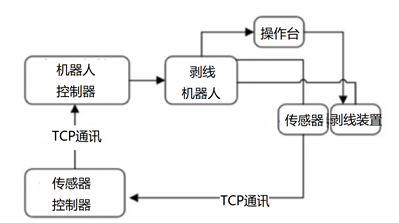
图表 1 系统结构原理
2 剥线位置特征提取
将高压电线置于激光传感器的视野内,激光线被投射到剥线位置上;同时 CCD 相机采集被剥线位置表面调制后的光条信息;使用Steger算法提取光条中心;最后在三维数据点的 基础上,采用二阶差分特征点检测算法实现剥线位置的识别和定位。算法处理过程主要经过高斯平滑滤波、二阶差分、局部极大值抑制等算法,可以得到较好的效果【1】。
[1]陈新禹,张庆新,朱琳琳,胡为.基于激光视觉传感器的机器人实时焊缝跟踪方法[J].激光与红外,2021,51(04):421-427.















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









