







 本文深入探讨了激光雷达(LDS)技术的工作原理,并着重讲解了在实际应用中如何应对环境光干扰的问题,对于理解和优化机器人及SLAM系统的激光传感器性能具有重要意义。
本文深入探讨了激光雷达(LDS)技术的工作原理,并着重讲解了在实际应用中如何应对环境光干扰的问题,对于理解和优化机器人及SLAM系统的激光传感器性能具有重要意义。
一、激光雷达(LDS)简介
1.激光雷达应用举例:
现在自主移动机器人领域非常火爆,无人车、无人飞机、水下机器人、仓储机器人、扫地机等应用层出不穷。激光雷达传感器是地面移动机器人的标配,一些空中机器人也必须使用激光雷达。

图1.1 产品图
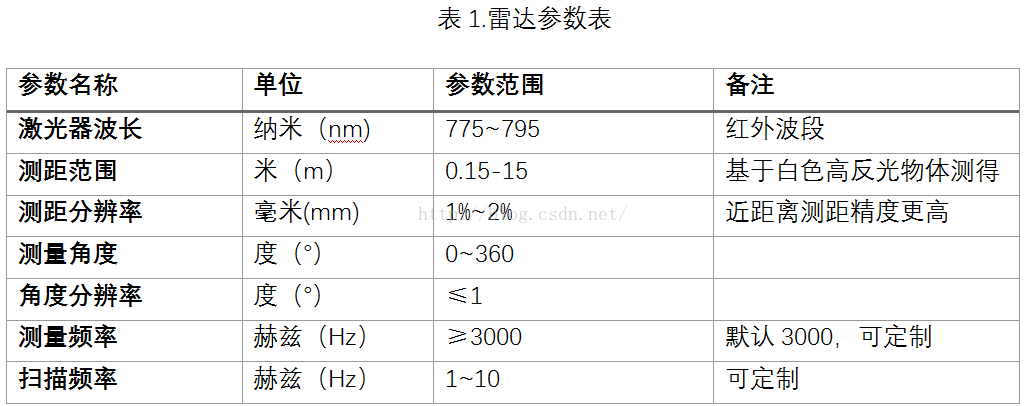
图1.2 雷达参数
二、测距模组原理分析及设计
1.三角测距原理
三角测距测量模型如下图。
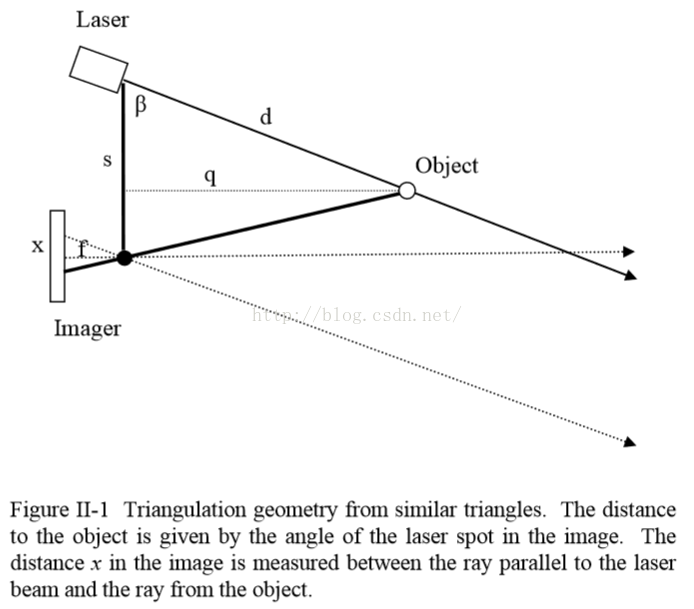
图2.1 三角测距模型
从测距模型,根据相似三角形原理,我们可知,

其中,q为实测距离,s为激光头与镜头的距离,f为镜头的焦距,x与s对应;x该变量假设了角 度β是一个常量。
角度β和q的关系如下,
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 880
880

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









