




1.PX4开发环境配置过程中,gitsubmodule更新过程中,已将MAVLInk的文件下载,其中的消息格式定义在xml文件中,可通过MAVLink生成器生成对应版本和语言的库。(此处的v1.0并非指MAVLink版本)
cd ~/PX4-Autopilot/src/modules/mavlink/mavlink/message_definitions/v1.0/ 2.在目录~/PX4-Autopilot/src/modules/mavlink/mavlink下,存在文件mavgenerate.py即为MAVLInk消息生成器。
2.在目录~/PX4-Autopilot/src/modules/mavlink/mavlink下,存在文件mavgenerate.py即为MAVLInk消息生成器。
3.在xml文件中自定义一条MAVLink消息,打开common.xml。
gedit ~/PX4_Firmware/src/modules/mavlink/mavlink/message_definitions/v1.0/common.xml下拉到文件最下方,模仿message的格式自定义一条消息,注意消息ID不要与现有的消息重合。
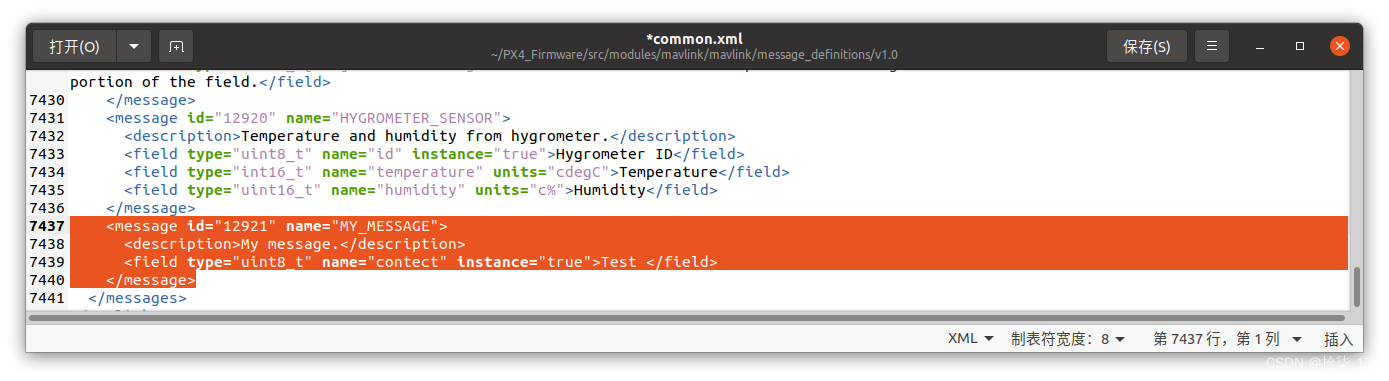
<message id="12921" name="MY_MESSAGE">
<description>My message.</description>
<field type="uint8_t" name="contect" instance="true">Test </field>
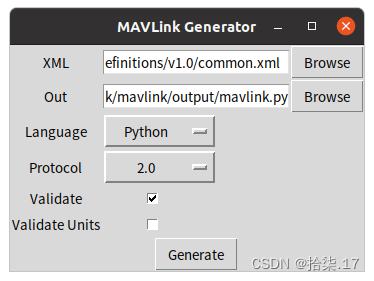
</message>4.执行MAVLink生成器。
python3 ~/PX4_Firmware/src/modules/mavlink/mavlink/mavgenerate.py选择刚刚修改的common.xml文件,输出路径可新建一个output文件夹,再手动在Out栏指定文件名mavlink.py,此处以生成Python语言的2.0版本为例,点击Generate。
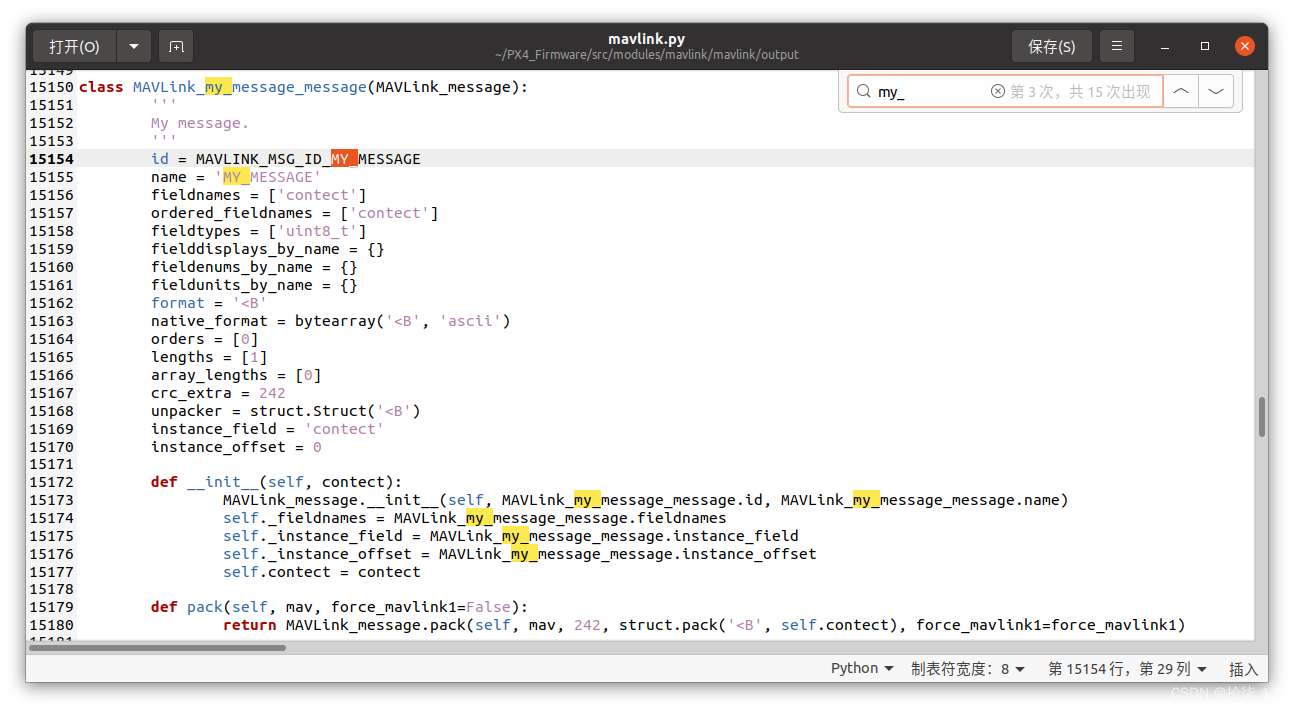
5.检查生成的文件,搜索刚刚定义的消息名,可见已经生存对应的类。
6.发送,此处在文章《MAVLink系列——实战一:通过UDP发送MAVLink消息(python版本)》提供的代码下增加自定义消息,编写好以后,命名为send.py,与刚刚生成的mavlink.py保存在同一路径下。
#!/usr/bin/env python3
import time
import socket
from mavlink import *
class DeviceUdp(object):
"""
"""
def __init__(self, local_addr, target_addr=None):
self.dev = None
self.local_addr = local_addr
self.target_addr = target_addr
self.dev = socket.socket(socket.AF_INET, socket.SOCK_DGRAM)
self.dev.bind(self.local_addr)
def write(self, buf):
send_callback = self.dev.sendto(buf, self.target_addr)
local_addr = ('', 14540)
target_addr = ('127.0.0.1', 14550)
dev = DeviceUdp(local_addr, target_addr)
sys_id = 1
cmp_id = 1
mav = MAVLink(dev, sys_id, cmp_id)
for i in range(10):
msg = MAVLink_heartbeat_message(MAV_TYPE_QUADROTOR, MAV_AUTOPILOT_PX4, MAV_MODE_PREFLIGHT, 0x60000, MAV_STATE_STANDBY, 2)
mav.send(msg)
print("Send my_message {}-th".format(i))
time.sleep(1)
msg = MAVLink_my_message_message(255)
mav.send(msg)
print("Send heartbeat {}-th".format(i))7.接收数据。
#!/usr/bin/env python3
import time
import socket
from mavlink import *
class DeviceUdp(object):
"""
"""
def __init__(self, local_addr, target_addr=None):
"""
local_port: local port to receive data
For example, target_addr = ('192.168.4.1', 18750)
"""
self.dev = None
self.local_addr = local_addr
self.target_addr = target_addr
self.dev = socket.socket(socket.AF_INET, socket.SOCK_DGRAM)
self.dev.bind(self.local_addr)
def write(self, buf):
send_callback = self.dev.sendto(buf, self.target_addr)
def read(self, size):
buf, source_addr = self.dev.recvfrom(size)
return buf
local_addr = ('', 14550)
target_addr = ('127.0.0.1', 14540)
dev = DeviceUdp(local_addr, target_addr)
sys_id = 3
cmp_id = 1
mav = MAVLink(dev, sys_id, cmp_id)
list_t = list()
while True:
data = dev.read(256)
msg = None
if len(data)>0:
try:
msg = mav.parse_char(data)
except Exception as e:
continue
if msg.get_srcSystem() == 1:
if isinstance(msg, MAVLink_heartbeat_message):
print("INFO: sys={}, cmp={}, msg_id={}".format(msg.get_srcSystem(), msg.get_srcComponent(),msg.get_msgId()))
print(msg)
else:
print("INFO: sys={}, cmp={}, msg_id={}".format(msg.get_srcSystem(), msg.get_srcComponent(),msg.get_msgId()))
print(msg)
pass
7.运行测试。分别在2个终端运行send.py和read.py。
python3 send.py
python3 read.py # 另打开一个终端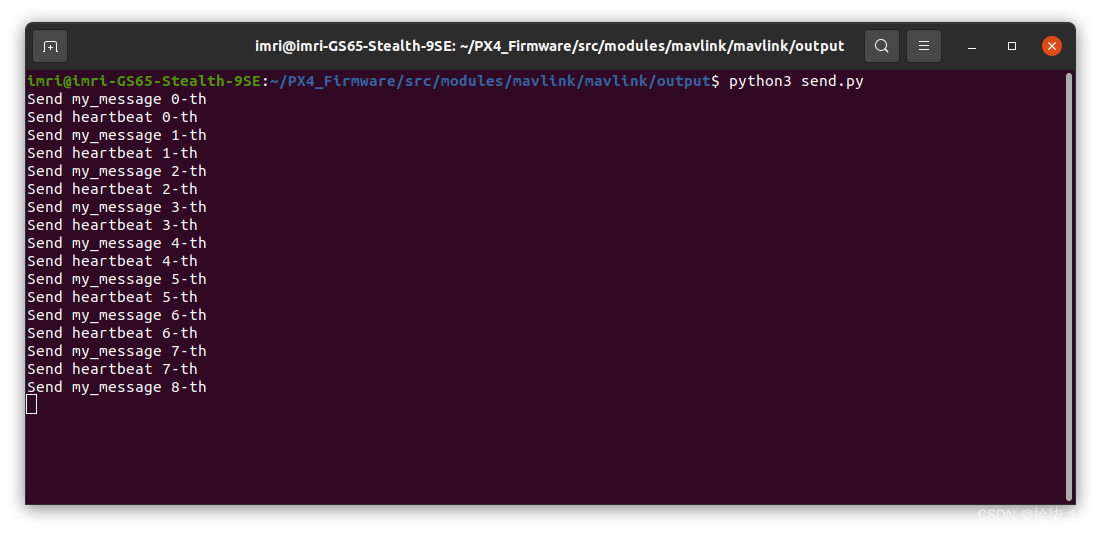
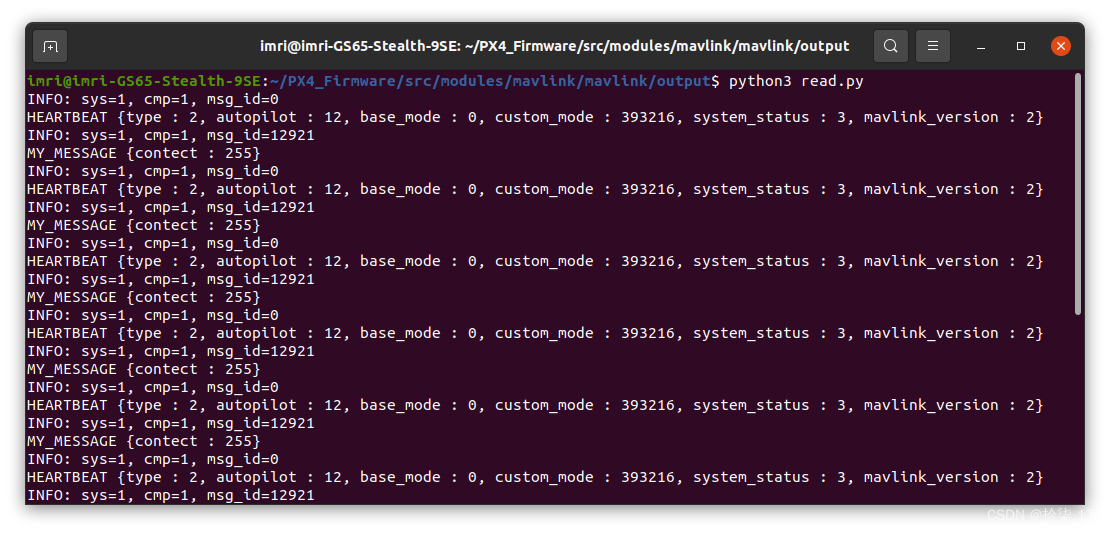 可见发送端显示Send my_message x-th,接收端显示MY_MESSAGE {contect : 255}等内容,至此,自定义MAVLink消息收发测试成功。
可见发送端显示Send my_message x-th,接收端显示MY_MESSAGE {contect : 255}等内容,至此,自定义MAVLink消息收发测试成功。



















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











