







文章目录
说明
众所周知,ROS/ROS2的地图默认文件是*.pgm+*.yaml的组合,其中yaml文件保存一些配置项,比如
image: /home/cwj/debug/hai_ning/0802/map.pgm
resolution: 0.050000
origin: [-18.700000, -31.000000, 0.0]
negate: 0
occupied_thresh: 0.65
free_thresh: 0.195
pgm文件是一个图片文件,可以通过图片浏览器打开
PGM格式是portable graymap format的缩写,并没有对图片进行压缩或者别的操作,保存的是灰度信息
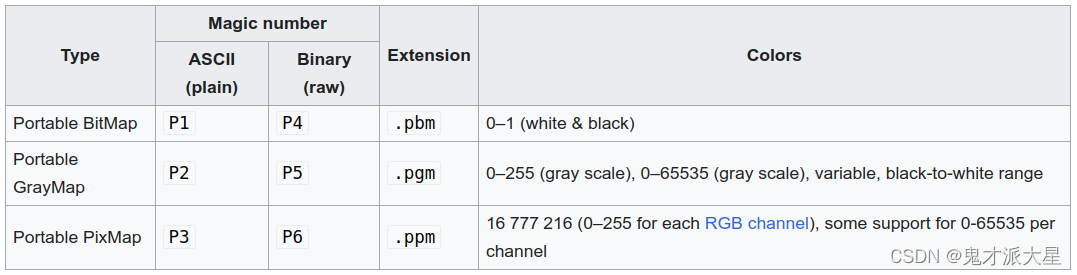
头部保存了一些文件的信息,比如
P5
#-22.739351 -12.346523 0.0
1132  最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 3326
3326











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









