







一、关于环境
请参考:pymeshlab遍历文件夹中模型、缩放并导出指定格式-CSDN博客
二、关于代码
本文所给出代码仅为参考,禁止转载和引用,仅供个人学习。本文所给出的例子是https://download.csdn.net/download/weixin_42605076/89233917中的obj_000001.ply。
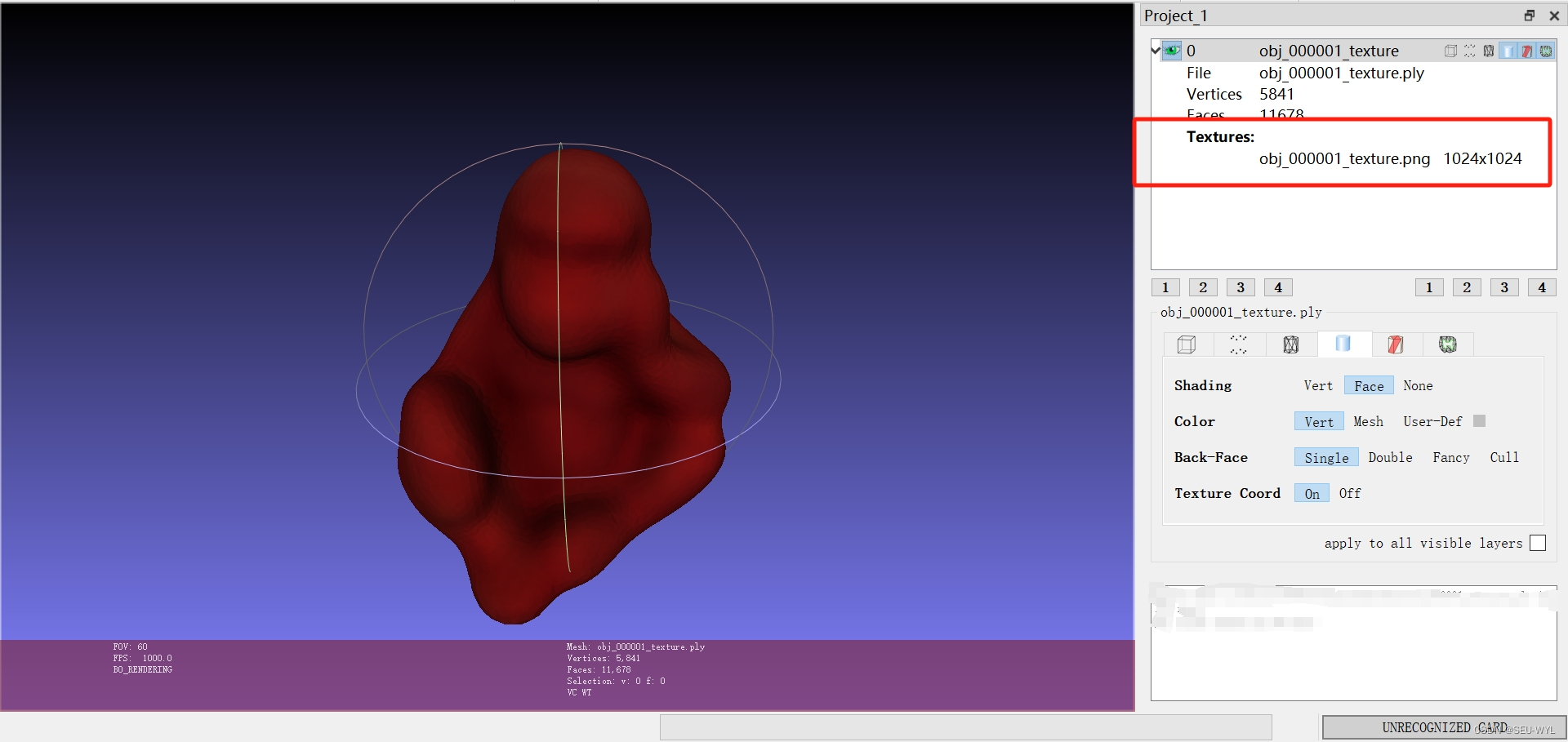
运行代码后创建的具有UV纹理图的物体模型

UV纹理图
# pymeshlab需要导入,其一般被命名为ml
import pymeshlab as ml
# 本案例所使用的3D模型为压缩包中的obj_000001.ply,请将其与本脚本放置在同一文件夹内。
input_file = 'obj_000001.ply'
# 首先需要创建一个空的容器
mesh = ml.MeshSet()
# 然后,加载物体模型
mesh.load_new_mesh(input_file)
# 创建UV映射
mesh.parametrization_trivial_per_triangle(
sidedim = 0, #每行四边形:指示每条线上必须放置多少个三角形(每个四边形包含两个三角形)保留0以进行自动计算
textdim = 1024, #纹理尺寸(px):指示纹理的大小
border = 2, #三角形间边界(px):指定参数化域中三角形之间的剩余像素数
method = 'Space-optimizing', #方法:选择空间优化,将较小的面映射到参数化域中的较小三角形中
)
# 将顶点颜色转换为UV纹理,并保存PNG纹理图
mesh.transfer_vertex_color_to_texture(
textname = input_file.replace('.ply', '_texture.png'), #纹理名称:要创建的纹理的名称
textw = 1024, #纹理宽度(px):纹理宽度
texth = 1024, #纹理高度(px):纹理高度
overwrite = False, #覆盖纹理:如果当前网格具有纹理,则将覆盖(具有提供的纹理维度)
pullpush = True, #填充纹理:如果启用,则使用拉-推填充算法对未映射的纹理空间进行着色,如果false设置为黑色
)
# 保存具有UV纹理的模型
mesh.save_current_mesh(input_file.replace('.ply', '_texture.ply'))
















 2215
2215

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









