









今天给大家推荐一个对新手非常友好的AI入门课程《AI-For-Beginners》。
该课程由微软推出,为期12周,共24课时,对比Google的AI入门课更通俗易懂一些,强烈推荐刚入门的AI小白们学习!而且是免费!课程资源看文末
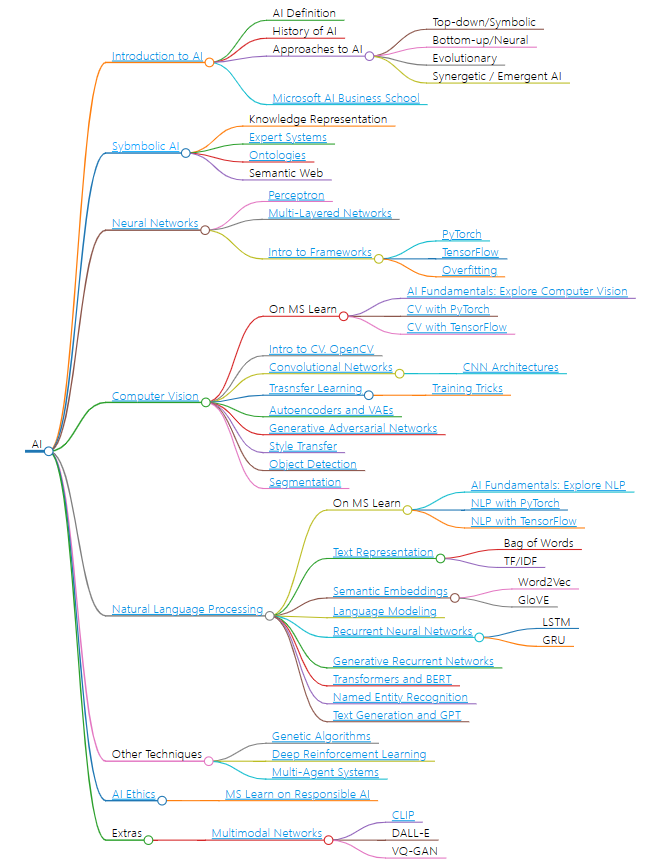
课程内容包括:
-
不同的人工智能方法,包括“老派”的符号方法与知识表示和推理(符号人工智能)。
-
神经网络和深度学习是现代人工智能的核心。课程使用两个最流行的框架——TensorFlow和PyTorch中的代码来阐述这些重要主题背后的概念。
-
用于处理图像和文本数据的神经网络架构。课程介绍最近的模型,但可能会缺少一点关于最新技术的内容。
-
不太流行的人工智能方法,比如遗传算法和多智能体系统。
课程还提供了全部内容的思维导图,每个课程模块都配有专门的手绘知识点关系图。
除此以外,每个课程还包含了一些预备读物,以及一些可执行的Jupyter Notebook,这些Notebook通常特定于某个框架(PyTorch或TensorFlow),还包含大量的理论材料。对某些主题而言,还提供了实验供我们尝试将所学内容应用到特定问题上。
关注下方《学姐带你玩AI》🚀🚀🚀
回复“微软课”获取完整课程
码字不易,欢迎大家点赞评论收藏!

















 86
86

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









