






基于虚拟阻抗的下垂控制框图如下:
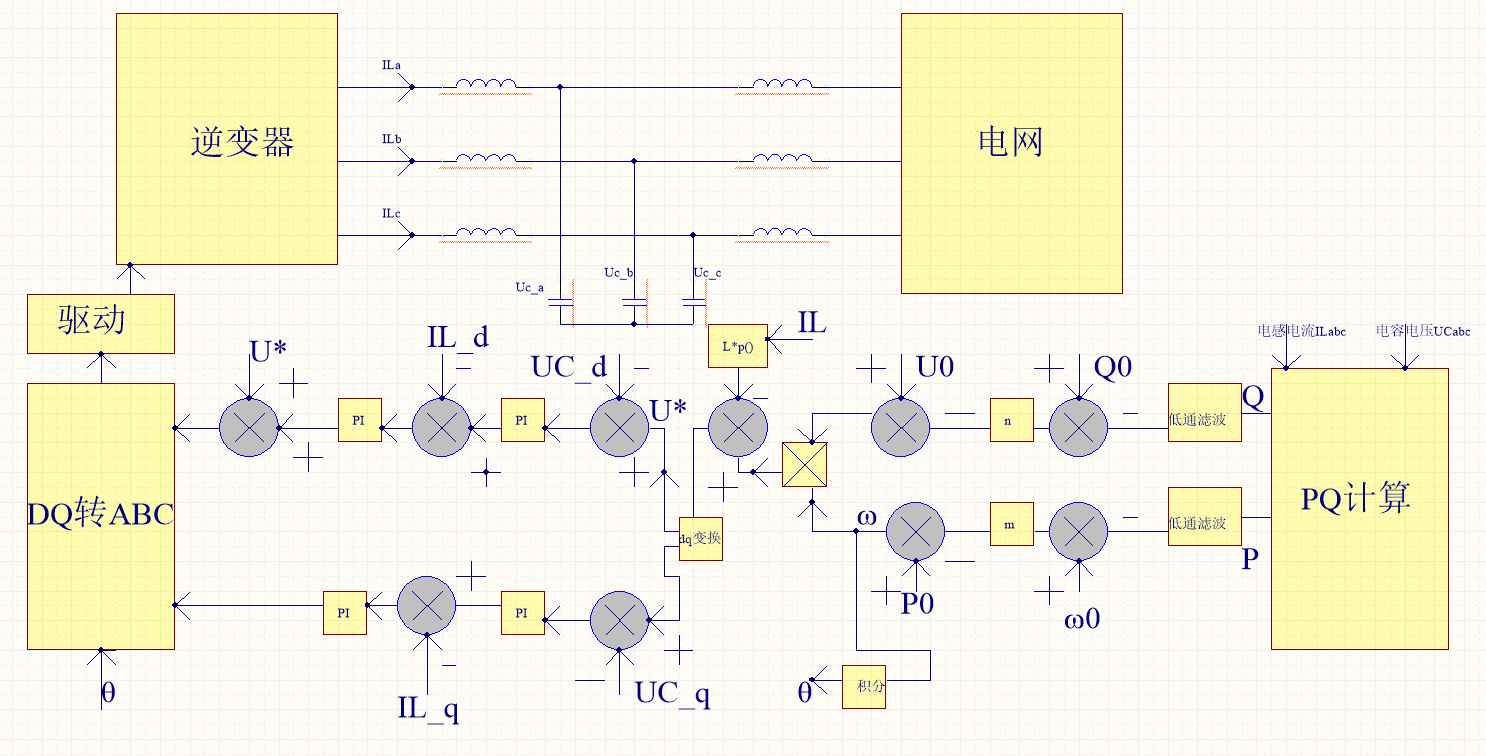
和基本的下垂控制框图区别在于,下垂获得幅值和相位角以后,合并成矢量,用该适量减去模拟的虚拟阻抗电压(此处模拟成电感,用采样电流的微分L*d(IL)/dt获得,写成微分算子形式Lp(IL)),获得电容电压矢量,对该矢量dq变换后获取,有功无功电压指令,在进行电压电流双环控制即可。
说白了,就是人为的在控制环路里面增加了电感电压。

基于虚拟阻抗的下垂控制框图如下:
和基本的下垂控制框图区别在于,下垂获得幅值和相位角以后,合并成矢量,用该适量减去模拟的虚拟阻抗电压(此处模拟成电感,用采样电流的微分L*d(IL)/dt获得,写成微分算子形式Lp(IL)),获得电容电压矢量,对该矢量dq变换后获取,有功无功电压指令,在进行电压电流双环控制即可。
说白了,就是人为的在控制环路里面增加了电感电压。

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





















 793
793





