






 本文详细介绍了如何在STK中对问题1——地面站雷达观测航班和问题2——导弹天线观测北斗卫星进行建模,包括飞行航班的插入、地面雷达的设置(固定和扫描视场)、以及使用Access计算飞行航班与雷达的可见性。
本文详细介绍了如何在STK中对问题1——地面站雷达观测航班和问题2——导弹天线观测北斗卫星进行建模,包括飞行航班的插入、地面雷达的设置(固定和扫描视场)、以及使用Access计算飞行航班与雷达的可见性。
简介
对以下两个问题进行建模:
问题1、地面站布设有一个扫描式雷达和一个全向雷达,计算何时雷达的视场中可以看到空中飞行的航班?

问题2、导弹腹部安装有三部接收天线(传感器),在从地面飞行之高轨过程中,计算每部天线可以看到多少颗北斗卫星?

一、问题一建模
(1)创建飞行航班
首先插入STK中的Aircraft对象,选择默认插入方式,将插入的飞行器命名为TestFlight。双击TestFlight编辑属性,在Basic下Route中,Propagator选择GreatArc,GreatArc定义了飞行器在给定高度下沿着地球表面、上方或下方逐点行进的路线,形成一条连接着这些航路点、与地球中心相交的平面上的大弧形路径。
点击右端Insert point,插入航迹点,设置飞行航迹点为
| Waypoint | Latitude | Longitude | Altitute |
|---|---|---|---|
| 1 | 36.9034 deg | -104.439 deg | 10.66800000 km |
| 2 | 41.14 deg | -104.82 deg | 100.66800000 km |


(2)仿真地面雷达
首先插入地面点Place,选择默认插入方式,命名为RadarSite
双击地面点打开编辑属性,设置Latitude 38.8006 deg,Longitude -104.6784 deg,Height Above Ground 50 ft。
使用传感器对象(Sensor)连接到对象上,模拟固定视场和运动视场。传感器还可用于模拟固定物体上的仪器,如Facility、Place和Target物体。附着在静止物体上的固定传感器物体也指向父物体的参考系。由于静止的物体永远不会改变位置或方向,固定的传感器物体将始终指向相对于父物体的固定方向。
这里创建两个传感器,一个是视场向上、存在视场距离限制的传感器。另一个是扫描式传感器。
首先创建第一个传感器,插入传感器对象,传感器连接对象选择RadarSite,将传感器命名为RadarDome。

双击RadarDome传感器,编辑其属性,传感器属性选择Simple Conic,半波束角选择85 deg。

不同的传感器属性解释如下:
| Type | 解释 |
|---|---|
| Complex Conic | Defined by specified inner and outer half angles and minimum and maximum clock angles. |
| Custom | Import a custom sensor pattern file. |
| EOIR | Models electro-optical and infrared sensors. |
| Half Power | Models a parabolic antenna. |
| Rectangular | Specify vertical and horizontal half-angles that will be used to model the field of view of an instrument. |
| SAR | Synthesizes the aperture of a larger antenna than is actually present, using SAR pattern definitions designed to model the field of regard of a SAR sensor onto the surface of the earth. |
| Simple Conic | Defined by a specified cone half angle. |
所创建的默认传感器位于连接对象中心,传感器中心向量(Pointing)指向为下图。默认指向固定在0度方位角和90度仰角,即沿地心指向天空。

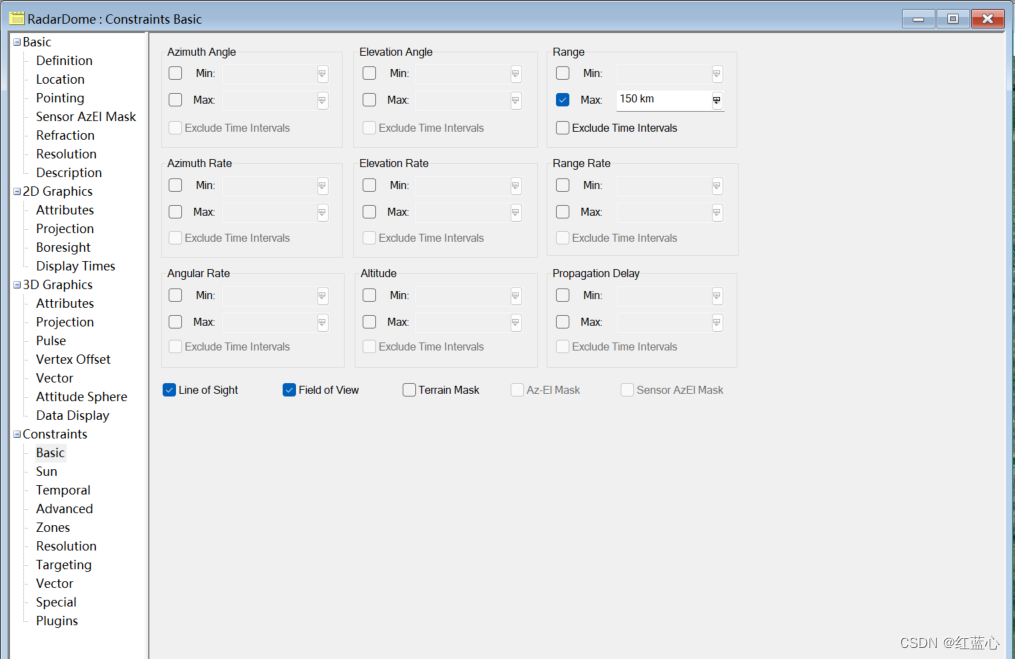
设置传感器最远视场为150km:
完成设置后,该传感器可见范围如下;

接下来创建第二个传感器,命名为RadarSweep,为扫描式传感器。传感器类型选择Rectangular,垂直半角为5 deg,水平半角为35 deg

传感器指向选择spining,Spin Rate (Revs/Min) 为12,Spin Axis Cone Angle为55 deg。

扫描传感器创建结果为

(3)可见性判断
在Access中,可见性计算源对象选择为飞行航班TestFlight,目标选择为地面模拟的两个传感器雷达,并计算可见性。

飞行航班与地面雷达传感器可见时间段,以及可见时的距离角度计算结果分别为


可见时,3D及2D场景如下

问题2建模见下一篇文章。
更多仿真内容,可以关注公众号“STK建模”查看


















 784
784

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









