






 本文详细解释了如何通过2D旋转概念理解3D旋转,介绍了绕X、Y、Z轴的旋转矩阵,以及如何定义和执行绕不同轴的旋转和平移操作,包括A(t)、B(t)、C(t)和D(a,x)等基础操作,以便在3D空间中精确控制物体的坐标变换。
本文详细解释了如何通过2D旋转概念理解3D旋转,介绍了绕X、Y、Z轴的旋转矩阵,以及如何定义和执行绕不同轴的旋转和平移操作,包括A(t)、B(t)、C(t)和D(a,x)等基础操作,以便在3D空间中精确控制物体的坐标变换。
二、2D到3D的坐标变换问题
关于2d旋转变换问题在第一篇已经讲过,大概再整理基本内容,如下图:

3D旋转问题如下:
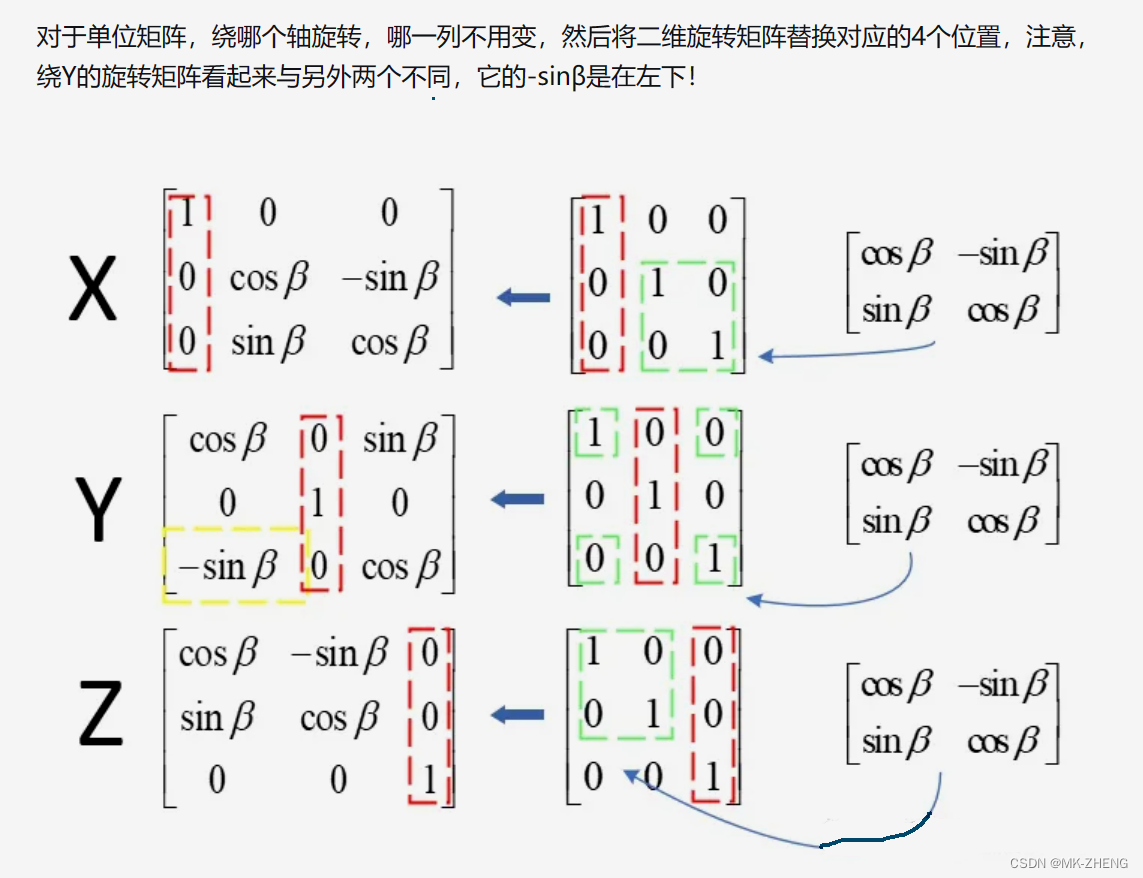
1、三维旋转可借助二维旋转来理解,由于三维空间中可以任意轴旋转,为方便分析与使用,只考虑绕X、Y、Z轴的旋转。

进阶:
以上我们得到了三个旋转矩阵,分别是绕x轴旋转,绕y轴旋转,绕z轴旋转,下面我们开始定义操作。
定义旋转操作
旋转单次
我们定义:
绕x轴旋转为操作A;
绕y轴旋转为操作B;
绕z轴旋转为操作C。
如果一个物体R想要绕x轴旋转t角度,得到一个新的物体位置R’,我们可以写为
R’ = A(t)R
其中R与R’就是坐标向量,A与R之间是向量乘法,A(t)代表的是绕x轴转角度t。
当然,一个物体不可能只有一个坐标点,如果存在多个坐标点R1,R2,R3,那么就一一乘上A(t)即可,也就是R1’=A(t)R1, R2’=A(t)R2, R3’=A(t)R3,最后得到新的物体的三个坐标点R1’, R2’, R3’。
连续多次旋转
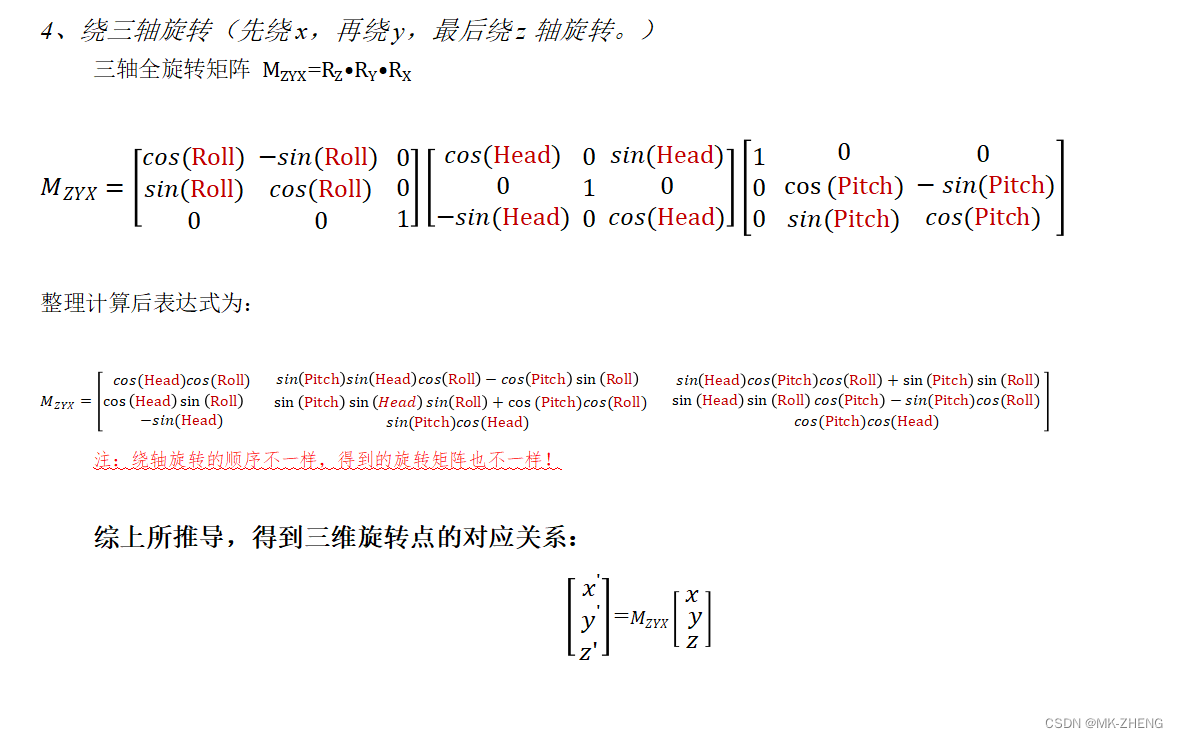
如果我们想让这个物体首先绕x轴旋转角度t1,然后再绕y轴旋转角度t2,再绕z轴旋转角度t3,那么我们该怎么写?
我们一步一步看,首先是绕x轴旋转角度t1,公式为R’=A(t1)R。此时旋转后的物体的坐标是R’。
然后是绕y轴旋转角度t2,公式为R”=B(t2)R’。此时旋转后的物体的坐标是R”。
最后是绕z轴旋转角度r3,公式为R”’=C(t3)R”。此时旋转后的物体的坐标是R”’。
也就是说后一个操作是对当前物体的坐标进行操作。
那么我们两个两个看,联立前两个,先绕x轴t1角度再绕y轴t2角度,公式为R”=B(t2)R’=B(t2)A(t1)R。从公式中看这两步操作实际上是对R乘了两个矩阵B(t2)和A(t1),这样就变成了R”。
注意,操作按照先后次序,右边的矩阵为先操作,左边的矩阵为后操作。
那么同理我们可以得到旋转三次后的坐标R”’=C(t3)B(t2)A(t1)R。
同理,如果存在多次操作,我们只需要按照顺序不断的左乘旋转矩阵就好。
不绕xyz轴旋转,过原点绕任意轴进行多次旋转
我们要将物体绕着直线z=y按右手方向旋转30度,这种情况就相对比较复杂了,因为它并不是xyz轴,所以我们旋转时有以下三步操作:
将坐标系进行旋转操作,令z=y
与原z轴重合,原z轴操作后的位置为z’轴;
将物体绕z轴按右手方向旋转30度;
将坐标系进行旋转操作,令z’轴与原z轴重合。
左边为原坐标系,右边为绕x轴旋转45度后的新坐标系,其中旋转过后的坐标系为xy’z’,我们想要绕着转的直线(原z=y)现在变成了z轴,那么这样子就变成了绕z轴旋转的情况。
所以我们将绕x轴旋转坐标系的操作记为A(45),所以物体现在的坐标为R′=A(45)R
之后我们就可以将物体绕z轴右手方向旋转30度了,操作记为B(30),所以现在物体的坐标为
R′′=B(30)R′
但是此时我们的坐标系还是以原z=y为z轴的坐标系,我们需要把z’轴转过来,变成最初的那个样子,所以我们需要把坐标系绕x轴旋转-45度,这样子z’就和z重合了,z=y也回到了原来的位置。
所以这一步操作记为A(-45),物体现在的坐标为R”’=A(-45)R”。
最后总的来说,这个物体从最初的状态到最后的状态相当于进行了三步操作,乘上了三个矩阵,即R”’=A(-45)B(30)A(45)R.
围绕轴不经过原点的旋转-初级
上面的方法全部都要经过原点,但如果我们想要围着转的对称轴不经过原点呢?这就要多加一个操作了,那就是给坐标加上个某一个值,比如我有坐标向量(x, y, z),想要向x轴平移1单位,那么新的坐标就变成了(x+1, y, z),相当于进行了如下操作
(x’, y’, z’) = (x, y, z) + (1, 0, 0)
所以我们这里定义一个新操作D(a,x)。其中a代表沿着位移方向的轴,方向只有三个,xyz。x代表的是唯一的距离,比如说上述操作就可以写为D(x,1),总的公式为R’=R+D(x,1)。
围绕轴不经过原点的旋转-高级
我们现在要将一个物体R绕着z=y-1这条线为轴右手方向旋转30度。其实步骤依旧和上面一模一样,只不过将z=y-1转到z轴上更为麻烦了而已,主要分为以下步骤。
首先将z=y-1平移到经过原点,也就是将坐标轴向y方向平移-1个单位,即操作D(y,1),平移后的物体坐标为R’=R+D(y,-1)。
然后就是之前举的例子了,我们直接可以写得(我用R2代替R”,以此类推)
R2=A(45)R’
R3=B(30)R2
R4=A(-45)R3
最后到了这里我们还得把z=y-1移到原来位置,也就是再加上一个D(y,1)操作,也就是
R5=R4+D(y,-1)
=A(-45)B(30)A(45)[R+D(y,-1)]+D(y,1)
这样子,我们就可以实现任何操作
总结
可以看出,我们最终达到实现任何操作的步骤为三步
将我们想要旋转的轴通过旋转与平移操作将其与任一坐标轴重合;
进行我们想要绕着旋转轴旋转的操作;
将旋转轴通过旋转与平移操作移动到原来的位置。
并且我们的基础操作总共有4个,其中三个旋转一个平移,分别为:
绕x轴右手方向旋转t角度记为A(t);
绕y轴右手方向旋转t角度记为B(t);
绕z轴右手方向旋转t角度记为C(t);
沿某一轴(记为a轴)正方向平移x距离记为D(a, x)。
这样子我们得到的坐标就是我们实现了当前操作的坐标。


















 1846
1846

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











