







3D点云数据与几何基元拟合,可以得到3D点云数据中潜在的几何信息,从而将低层次的点数据转换为高层次的结构化信息,这为下游应用程序处理3D数据提供了基础。长期以来,基于RANASC的方法已是基元拟合问题的标准方法,但是这类方法需要细致地调整一些输入参数,因此无法很好地扩展应用到具多种形状的大型数据集中。本文提出了一个有监督的基元拟合网络(SPFN)和一个端到端的神经网络,该网络能够在无用户控制的情况下,鲁棒地检测不同尺度、不同数量的基元。该网络用真实基元表面和输入点的隶属关系来进行监督。该网络没有直接预测基元,而是先预测每点属性,再用一个差分模型来估计基元的类型和参数。我们在ANSI 3D机械零件模型的新基准上评估本方法,证明了无论是和基于RANSAC的SOTA方法相比,还是和神经网络直接预测的方法相比,本方法效果都有显著提升。
提出一种端到端的有监督神经网络SPFN(Supervised Primitive Fitting Network),该网络以一个点云作为输入并且检测不同尺度、不同数量的基元。
差分基元模型估计器解决了一系列线性最小二乘法问题,使得整个模块能够实现端到端训练。
本方法在新颖的机械零件CAD模型数据集中有优越性。

SPFN使用PointNet++作为分割架构,在PointNet的末端添加了三个独立的全连接层,其目的是预测每个点的属性:点对基元的隶属度矩阵 W'∈[0; 1]^N×K,法向量N'∈R^N×3,每个点对应的基元类型T'∈[0; 1]^N×L。基元的类型分别为平面,球体,圆柱体,圆锥体四种类型。在PointNet++末端使用softmax激活函数,获取在矩阵W和矩阵的行中的隶属概率,并且归一化法向量中的每一行。其次,在模型估计步骤中,根据点属性估计输出的基元参数。最后,通过PointNet++反向传播任何一种基元损失,从而实现端到端训练。损失定义为五个损失项之和,分别包括分割损失、点的法向量角度损失、每点基元类型损失、拟合残差损失、轴线角损失。
Primitives Recordering
文中为隶属度矩阵W'和W中所有的列对计算了松弛交并比(RIoU),两个指标向量的RIoU定义如下:

然后,通过匈牙利匹配的方法给出两个矩阵的列之间的最佳一对一对应关系(由RIoU确定)。再根据这种对应关系对真实基元进行重新排序,以使真实基元k与预测的基元k匹配。
Model Estimation
共提出了4种基元,平面,球,圆柱,圆锥
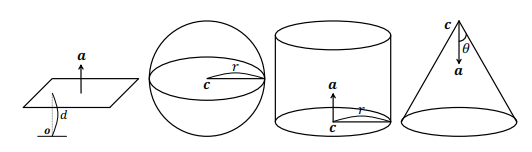
平面:A = (a, d)

球:A = (c, r)

圆柱:A = (a, c, r)

圆锥:A = (a, c, θ)

Loss Function
评估指标设计如下。对单个形状的每个数量进行描述,并将数字报告为所有测试形状中这些数量的平均值。对于每一个基元度量,先按照执行基元重新排序,以便匹配预测基元和基本真元的索引。
















 2334
2334











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









