






本文为捷克理工大学(作者:Michal Cáp)的博士论文,共147页。
在多机器人系统中,一个长期存在的挑战是如何在不危及系统任务的情况下可靠地避免机器人之间的碰撞。这是因为现有的防撞技术要么倾向于死锁,即,机器人可能永远无法到达它们所期望的目标位置,或者难以计算,即,在实际时间内不能提供解决方案。研究了在多机器人系统中设计一种无死锁且计算简单的碰撞避免方法的可行性。
我们工作的核心结果是:1)观察到在适当结构的环境中,无死锁和计算上可处理的碰撞避免实际上是可能实现的;2)因此,我们提出了多机器人系统中实用的、有保证的集中式和分散式碰撞避免算法。我们采用了深思熟虑的方法,即首先由一个中心运动规划器或通过机器人之间的分散协商来计算协作的无碰撞轨迹,然后每个机器人沿着其规划的轨迹控制其前进。
我们首先回顾现有技术在单/多机器人运动规划中的应用,确定其局限性,随后为不同的使用情况设计新的集中式和分散式轨迹协作算法。首先,我们证明了经典优先规划技术的一个修正版本,在我们给定的某些条件下,它可以保证在多项式时间内总是返回一个解。具体地说,如果每个协作机器人的起点和终点都是所谓的结构良好的基础设施的终点,则可以保证提供解决方案。也就是说,它可以可靠地应用于起始和目的位置的机器人不妨碍其他机器人实现其目标的系统中,特别是在大多数人造环境中,这是一个令人满意的特性。
其次,我们设计了一个经典的和修正的优先级规划的异步分散算法,它可以通过机器人之间的点对点消息传递来寻找协作的轨迹。该方法继承了集中式方法的保证条件,但利用了多机器人团队之间的计算能力,可以更快地计算求解。
第三,与上述批量协作机器人的算法相比,本文设计了一种分散的增量协作算法。也就是说,机器人可以在系统运行期间的任何时候被命令重新定位。我们已经证明,如果机器人的任务是在一个结构良好的基础设施的端点之间重新定位,那么该算法保证在二次时间内总能找到每个重新定位任务的无碰撞轨迹。
第四,我们证明了当个体机器人受到逐渐增加的碰撞惩罚时,其轨迹的增量重规划可以作为一种强大的启发式方法,能够产生接近最优的解。最后,我们设计了一种新的控制律,用于在存在延迟干扰的情况下,控制团队中单个机器人沿着其规划的轨迹前进,例如人类遵循机器人行进的道路。当处理干扰的简单控制策略可能导致死锁时,我们证明在所提出的控制律下,机器人总是能够到达目的地。
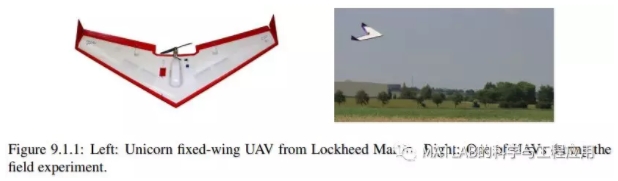
我们在合成模拟环境和实际现场实验中对所提出的技术进行了评估。在多达60个机器人的仿真实验中,我们观察到,与最新的反应式避碰技术相比,该技术产生的运动轨迹更短,并且可靠地解决了反应式避碰技术失败的情况。此外,与许多提出的协作技术不同,我们通过在两个实际的多机器人系统中实现并测试所提出的协作方法,验证了我们算法的假设和方法的实际适用性。特别是,我们成功地将异步分散优先规划作为一种避免碰撞的机制部署到1)固定翼无人飞机的多无人机系统和2)使用自驾高尔夫球车的按需移动实验系统中,并进行了现场测试。
One of the standing challenges inmulti-robot systems is how to reliably avoid collisions among individual robotswithout jeopardizing the mission of the system. This is because the existingcollision avoidance techniques are either prone to deadlocks, i.e., the robotsmay never reach their desired goal position, or computationally intractable,i.e., the solution may not be provided in practical time. We study whether itis possible to design a method for collision avoidance in multi-robot systemsthat is both deadlock-free and computationally tractable. The central resultsof our work are 1) the observation that in appropriately structuredenvironments deadlock-free and computationally tractable collision avoidanceis, in fact, possible to achieve and 2) consequently we propose practical, yetguaranteed, centralized and decentralized algorithms for collision avoidance inmulti-robot systems. We take the deliberative approach, i.e., coordinatedcollision-free trajectories are first computed either by a central motionplanner or by decentralized negotiation among the robots and then each robotcontrols its advancement along its planned trajectory. We start by reviewingthe existing techniques in both single- and multi-robot motion planning,identify their limitations, and subsequently design new centralized anddecentralized trajectory coordination algorithms for different use cases.Firstly, we prove that a revised version of the classical prioritized planningtechnique, which may not return a solution in general, is guaranteed to alwaysreturn a solution in polynomial time under certain conditions that wecharacterize. Specifically, it is guaranteed to provide a solution if the startand destination of each coordinated robot is an endpoint of a so-calledwell-formed infrastructure. That is, it can be reliably used in systems wherethe robots at start and destination positions do not prevent other robots fromreaching their goals, which, notably, is a property satisfied in most man-madeenvironments. Secondly, we design an asynchronous decentralized variant of bothclassical and revised prioritized planning that can be used to find coordinatedtrajectories solely by peer-to-peer message passing among the robots. Themethod inherits guarantees from its centralized version, but can compute thesolution faster by exploiting the computational power distributed acrossmulti-robot team. Thirdly, in contrast to the above algorithms that coordinaterobots in a batch, we design a decentralized algorithm that can coordinate therobots in the systems incrementally. That is, the robots may be ordered torelocate at any time during the operation of the system. We prove that if therobots are tasked to relocate between endpoints of a well-formedinfrastructure, then the algorithm is guaranteed to always find acollision-free trajectory for each relocation task in quadratic time. Fourthly,we show that incremental replanning of trajectories of individual robots whilethey are subject to gradually increasing collision penalty can serve as apowerful heuristic that is able to generate near-optimal solutions. Finally, wedesign a novel control law for controlling the advancement of individual robotsin the team along their planned trajectories in the presence of delayingdisturbances, e.g., humans stepping in the way of robots. While naive controlstrategies for handling the disturbances may lead to deadlocks, we prove thatunder the proposed control law, the robots are guaranteed to always reach theirdestination. We evaluate the presented techniques both in synthetic simulatedenvironments as well as in real-world field experiments. In simulationexperiments with up to 60 robots, we observe that the proposed techniquegenerates shorter motions than state-of-the-art reactive collision avoidancetechniques and reliably solves also the instances where reactive techniquesfail. Further, unlike many proposed coordination techniques, we validate theassumptions of our algorithms and the consequent practical applicability of ourapproach by implementing and testing proposed coordination approach in tworeal-world multi-robot systems. In particular, we successfully deployed andfield tested asynchronous decentralized prioritized planning as a collisionavoidance mechanism in 1) a Multi-UAV system with fixed-wing unmanned aircraftand 2) an experimental mobility-on-demand system using self-driving golf carts.
- 引言
- 文献回顾
- 符号与问题定义
- 修正的优先权规划
- 异步的分散式优先权规划
- 在线轨迹协作
- 用于寻找近最优解的惩罚方法
- 干扰条件下执行的多机器人规划
- 实际部署测试
- 结论
更多精彩文章请关注公众号:














 1718
1718











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









