






(D-Net:用于城市移动激光雷达点云分类的基于密度的卷积神经网络)
摘要:
激光雷达点云的3D语义分割对于各种复杂的基础设施分析(如道路监控、数字孪生甚至智慧城市开发)至关重要。不同的几何和辐射描述符或不同的点描述符组合可以通过分类从激光雷达数据中提取目标。然而,点云的不规则结构是一个典型的描述符学习问题——如何以合适的结构考虑每个点及其周围环境来提取描述符?近年来,卷积神经网络(cnn)在自动分割和分类方面受到了广泛关注。以往的研究表明,深度学习模型在复杂点云分类和排列不变性方面具有很高的潜力和鲁棒性。然而,这些算法仍然从独立的点提取描述子,而没有研究中心点与其相邻点之间的深度描述子关系。提出了一种鲁棒高效的基于cnn的城市移动激光扫描点云自动分类框架D-Net。首先,在预处理步骤中将点云转换为规则的体素化结构。这有助于克服不规则性和非均匀性的挑战。密度值分配给每个体素,描述体素位置内的点分布。然后,通过训练设计好的CNN分类器,每个点都会收到其对应体素的标签。利用城市地区的点云数据集对D-Net方法的性能进行了测试。我们的结果显示了相对较高的性能水平,总体准确率(OA)约为98%,精度,召回率和F1分数超过92%。
1 引言
MLS
2 点云分类
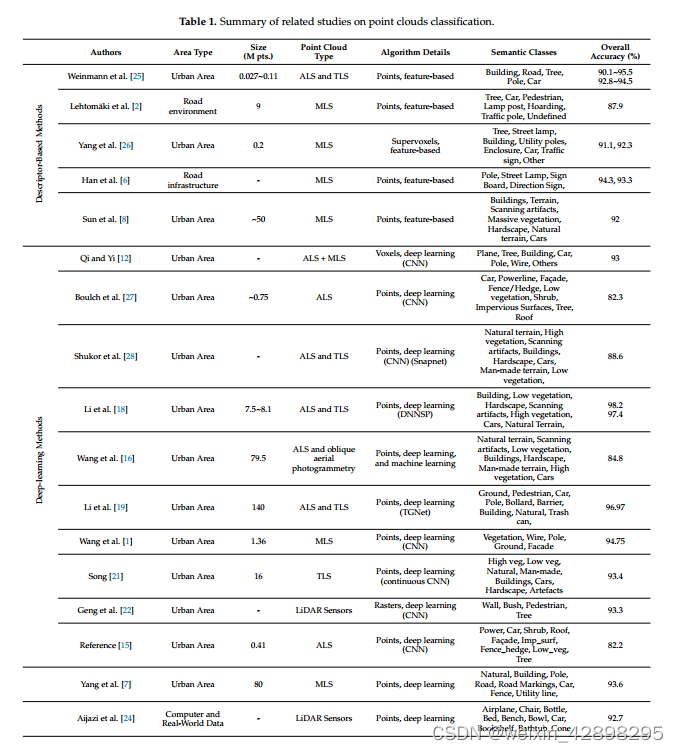
2.1 基于描述符的方法
包括两个独立的步骤:描述符提取和语义分类。
2.2 基于深度学习的方法
2.3 图总结
然而,我们提出了一个基于密度的基于cnn的框架(D-Net),它可以预测任意点云大小的点标签,以解决以前方法的一些问题。与所提出的点云分类的深度学习方法相比,D-Net将只采用原始的3D坐标作为输入,不需要额外的手动定义描述符。因此,我们的工作主要有以下积极贡献:实现了基于密度的体素化过程,以处理稀疏分布和小尺寸对象的负面影响。这种策略甚至在高密度物体的分类中也很有用。提出了一种高效的基于密度的CNN架构,通过点密度提取鲁棒描述子,在多数类和少数类不平衡的情况下对所有点进行分类。
3 建议的D-Net方法
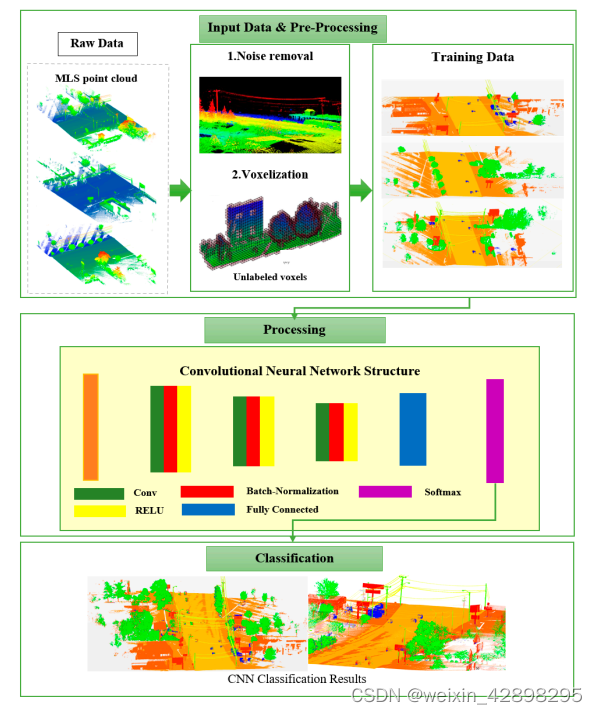
图提供了所建议算法的概述。在第一步预处理中,去除点云中的异常值后,考虑指定体素大小生成三维体素。然后,从输入体素网络中提取深度非线性描述符,并将其导入到完全连接(FC)层中,对每个体素中的点进行标记。
3.1 预处理
由于物体移动、光照变化和传感器特性等因素,原始3D LiDAR点云通常会受到噪声和异常值的污染。在本研究中,我们使用了Shukor和Rushforth[29]提出的方法来去除异常值。他们的框架生成点云数据的3D直方图,以计算在多个投影中获得的点的数量。噪声数据在该直方图中的频率较低,密度比其他记录点更稀疏,并且这些点可以被删除。过滤后的点云在三维空间中以指定的间隔进行体素化,将不规则的点云转化为规则的点云结构。
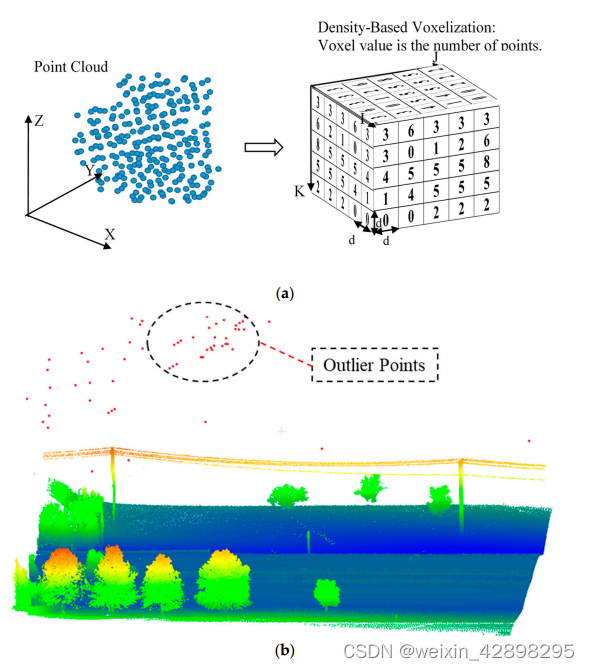
(a)基于密度的点云体素化和(b)离群点的实现。
4 实验和结果
4.1 数据集
MLS数据集是美国南卡罗来纳州安德森市76号公路(克莱姆森大道)600米路段的MLS数据集,用于评估拟议的D-Net。这条四车道的城市干道始于森林山大道,结束于东西公园路的交汇处。设置包含各种对象,如电力线、电线杆、建筑物和植被。虽然每个数据集点包含各种属性,如强度、位置和GPS时间,但在检查中仅使用3D坐标作为输入。















 851
851











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









