






(利用无人机-激光雷达强度频率数据进行的城市森林树种分类)
1.引言
使用激光雷达有三种常见的树种分类方法:
(1)利用单一激光雷达提取结构、强度等特征对树种进行分类;
(2)利用多个激光雷达提取结构和强度特征、植被指数特征等进行树种分类;
(3)利用激光雷达与其他传感器(如多光谱、高光谱)提取结构特征、光谱特征、植被指数特征等,对树种进行分类。
第一种数据处理方法相对简单,可以避免由传感器差异引起的潜在数据误差,但分类精度有限;第二种方法,即基于多个激光雷达数据的组合,在树种分类的准确性和数量方面具有更大的潜力,但数据收集和处理也相对麻烦,以及由于来自不同来源的数据差异而可能造成的错误;第三种方法使用激光雷达和其他传感器(例如,多光谱、高光谱)来对树种进行分类。该方法可以充分获取植被的光谱和结构信息,从而准确地对树种进行分类。然而,激光雷达数据经常被用作次要信息。结合光学遥感数据的同谱和异谱特征,在一定程度上限制了树种分类的准确性。
本研究以研究区域内的8种主要树种为对象,利用无人机激光扫描(UAV)数据构建147个强度频率特征,利用随机森林(RF)模型进行树种分类。分析了四种不同点云密度下树种分类的准确性。我们的总体目标是了解强度频率特征的物种辨别潜力。
具体的研究目的为:
1。描述种间和种内物种之间的强度频率的差异;
2。展示了强度和频率特征在树种分类中的应用能力;
3。量化点云密度在物种分类中的影响。
4。检查Mr选择的特征与RF选择的特征之间的一致性。
2.数据
ITC信息获取
本研究采用点云分割(point cloud segmentation, PCS)算法进行ITC提取。它是一种从上到下的区域生长方法,用于从点云中单独和顺序地分割树木。该算法从树顶开始,根据相对间距包括附近的点,“生长”出一棵单独的树。将间距小于指定阈值的点分类为目标树,阈值近似等于树冠半径。在此基础上,增加了形状指数(SI),避免了分支的拉长,提高了分割精度。PCS算法采用LiDAR360软件实现,空间阈值设置为各树种对应的平均冠径。分割结果为单个点云聚类树,同一聚类树中的每个点云具有相同的树ID。最后,通过图2的滤波得到每棵树的树冠。(a)原始数据解码后的点云切片;(b)去噪后的点云切片;(c)分离的地点云切片;(d)归一化点云切片。
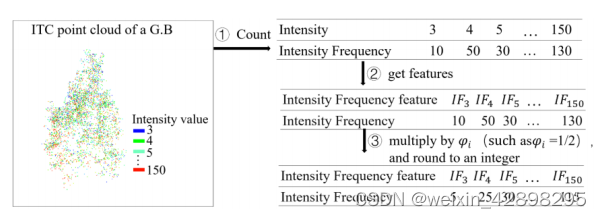
ITC点云得到的强度频率特征过程如图所示。首先,对已校正的ITC点云强度进行评估,得到强度频率;然后,将强度频率值分配给强度频率特征。例如,假设强度值为3 ~ 150的G.B ITC点云,其中强度为3的点在该ITC点云中出现的次数为10,则称为IF3 = 10。乘以ji并四舍五入后,IF3被认为是强度频率特征。本研究获得了IF3至IF150的147个强度频率特征
①count评估点云强度得到强度频率
②强度频率分配给强度频率特征
③乘以ji得到最终强度频率特征
——>3-150的147个强度频率特征。为什么没有12为什么到150
树种分类过程
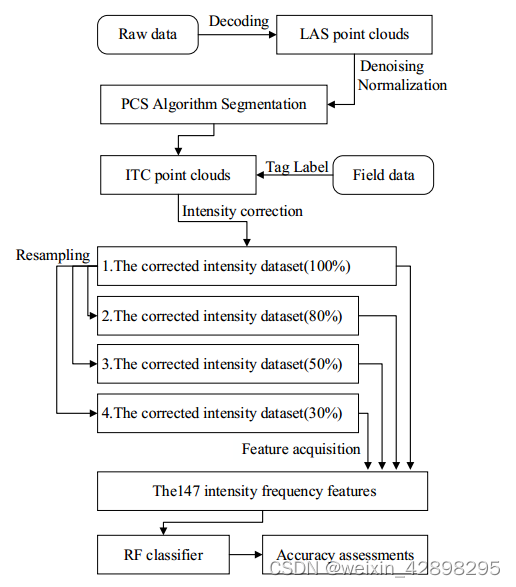
研究流程图如图所示。首先,将原始数据(Decoding)解码为LAS格式的点云。然后,对LAS点云进行去噪、归一化、分割(Lidar360中实现)为ITC点云。ITC点云在ArcGIS中使用野外数据标记为树种。然后,将强度校正数据集(100%)作为其他三个密度数据集进行重采样,得到每个数据集的每个ITC的147个强度频率特征。最后,对四个数据集进行了射频分类。
3 结论
ITC提取结果
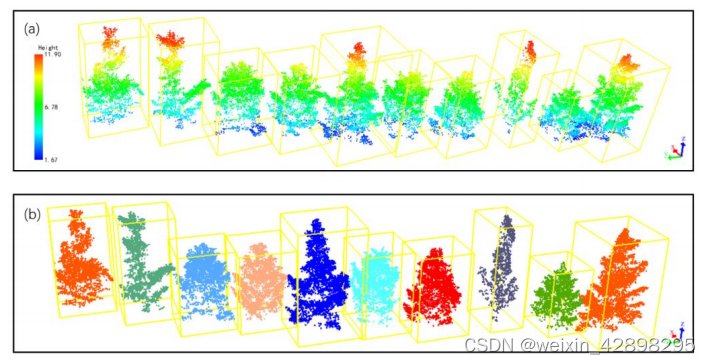
图a给出了G.B点云的示例,图b显示了使用PCS算法检测到的ITC。如图b所示,PCS算法能够成功检测ITC。在8种树种中,PCS算法共正确检测出987棵树,占调查树木总数的89.2%;未检出ITCs 123例(11.8%),未检出ITCs 139例(13.6%)。
强度校正结果
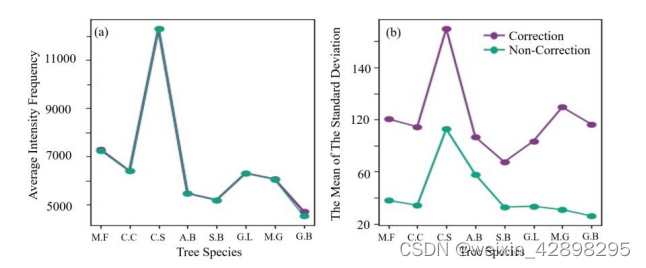
从图a可以看出,8个物种的平均ITC强度频率不同,其中C.S最高,G.B最低。这些差异为树种的分类提供了条件。
不同物种的强度频率结果
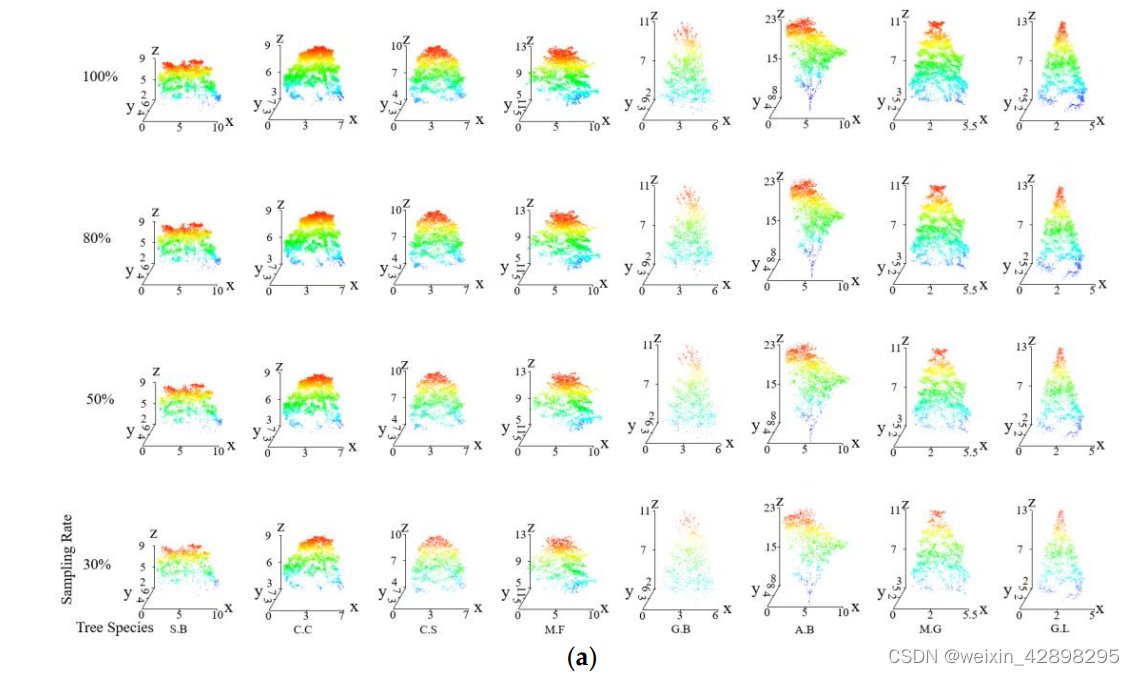
图a显示了8种树种采样率分别为100%、80%、50%和30%的点云示意图。 从图a可以看出,随着采样率的降低,点云从上到下逐渐稀疏,但冠层轮廓和关键点保持相对完整,这是意料之中的,因为是用全密度点云D1进行分割的。从左到右依次为不同树种的冠层形状、冠层点云成像、点云密度。例如,G.B的点云相对于其他7个物种而言相对稀疏,这可能是由于G.B本身的叶片较小,叶片之间的间隙较大,没有形成紧密展开的冠层形状,从而导致点云数量较少。这说明点云可以反映不同树种叶片形状和冠层结构的差异。
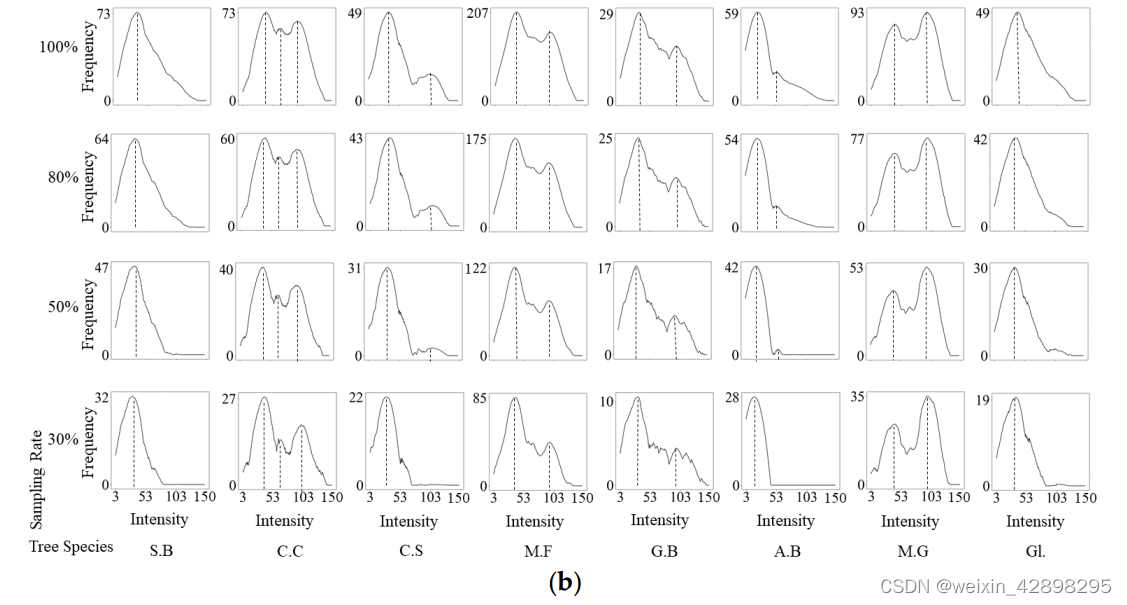 图b显示了8种树种不同密度下点云的强度频率曲线。从左到右,各树种的强度频率曲线特征不同,如峰值、波峰数、最大频率等,为利用强度频率对树种进行分类提供了条件。对于同一树种,随着采样率的降低,曲线形状相似,但波谷总体呈下降趋势。这可能是由于波谷本身较小,随机抽样后相对数量减少较多,所以曲线呈现波谷下降的趋势。采样率的降低,即点云密度的降低,会使曲线失去一些细节,从而可能导致树种正确分类率的降低,从而导致树种的误分类。例如,当cs的采样率为30%时,其频率曲线的第二波消失。强度频率曲线的形状和峰值与S.B和G.L相似,这可能导致C.S被误分类为S.B和G.L。这进一步表明点云强度频率表征树种差异的能力受到点云密度的影响。
图b显示了8种树种不同密度下点云的强度频率曲线。从左到右,各树种的强度频率曲线特征不同,如峰值、波峰数、最大频率等,为利用强度频率对树种进行分类提供了条件。对于同一树种,随着采样率的降低,曲线形状相似,但波谷总体呈下降趋势。这可能是由于波谷本身较小,随机抽样后相对数量减少较多,所以曲线呈现波谷下降的趋势。采样率的降低,即点云密度的降低,会使曲线失去一些细节,从而可能导致树种正确分类率的降低,从而导致树种的误分类。例如,当cs的采样率为30%时,其频率曲线的第二波消失。强度频率曲线的形状和峰值与S.B和G.L相似,这可能导致C.S被误分类为S.B和G.L。这进一步表明点云强度频率表征树种差异的能力受到点云密度的影响。
强度频差分析结果
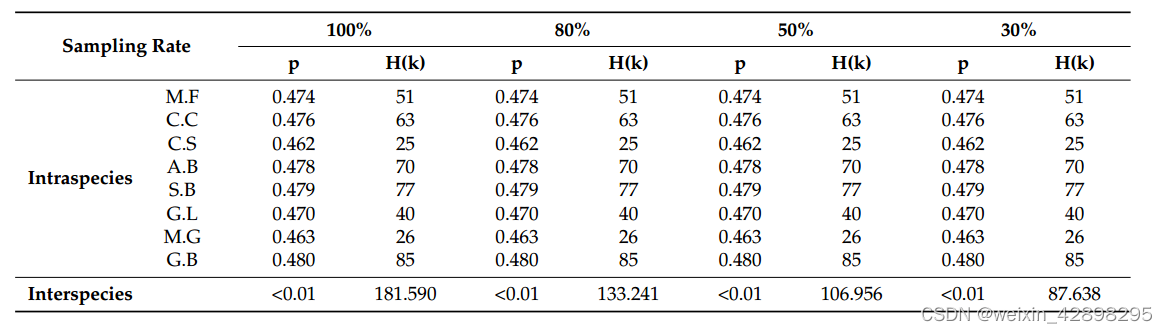
强度频差分析结果如表所示。从表可以看出,8种乔木种内强度频率的Kruskal-Wallis h检验p值均大于0.05,种间p值均小于0.01,说明种内强度频率差异不显著,但种间强度频率差异显著。这为基于强度频率区分8种树种提供了理论依据。此外,强度频率采样对树种分类差异的影响如表所示。分析表明,随着采样率的降低,种间统计量H(K)逐渐降低,而种内统计量p和H(K)保持不变。这可能表明,随着点云中点数的减少,种间强度频率的总体统计变异减小;种内强度频率的统计变异保持不变,具有一定的稳定性。
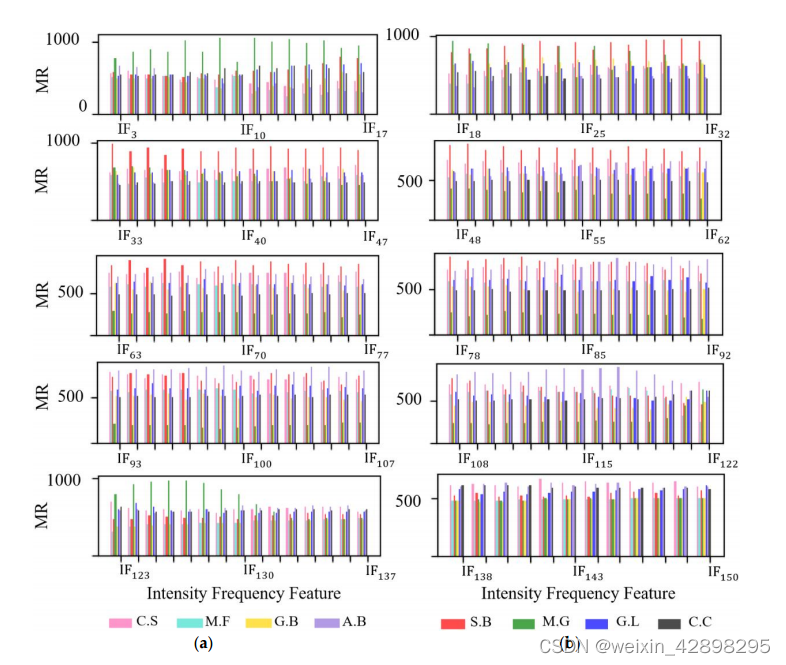
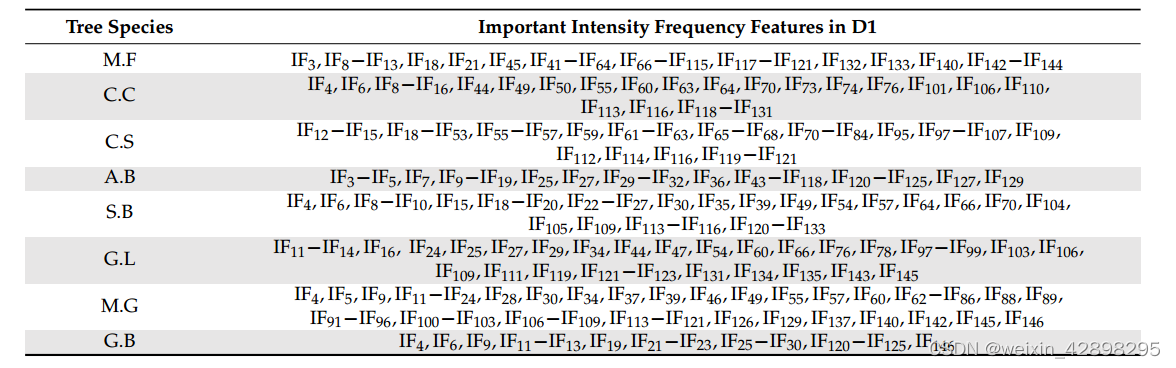
图显示了147个特征下每个树种的MR直方图。每个特征上方有8条横条,表示8种树种。条形图的高度表示该树种在该特征下的平均等级(MR)。统计上,如果MR显著不同,则认为两组样本所属的总体显著不同。通过观察高度差异显著的条形图,可以初步看出哪些树种在特征上与其他树种的差异更大。本研究以平均MR的4%作为阈值,筛选各树种最相关的特征,如表所示。
随机森林重要特征的筛选结果
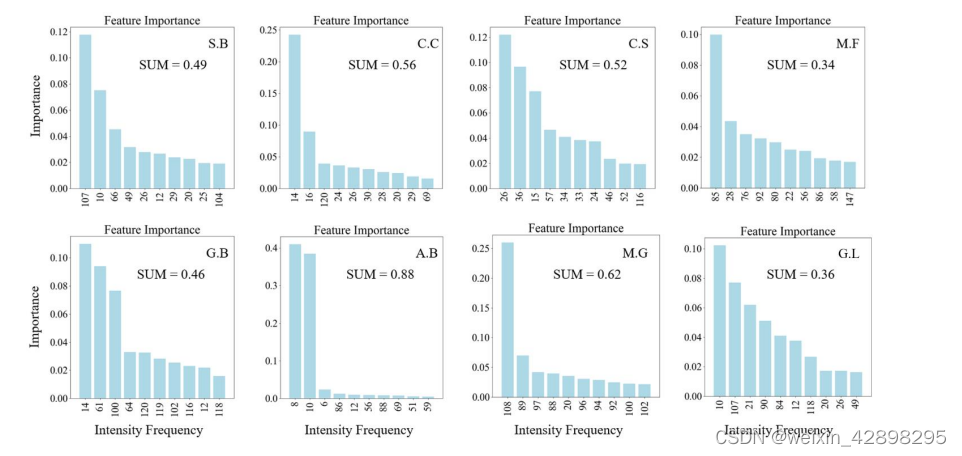
图显示了使用D1中的RF模型对8种树种进行树分类时最重要的10个特征。如图所示,8种树种中相关度最高的前10个特征占147个特征总数的34%以上。其中,A.B前10个特征中相关度最高的特征占88%。
对比上图和表可以看出,mr选择的先验特征覆盖了RF选择的前10个后验特征。这可以为今后在分类前使用MR选择最相关的特征提供参考。对于M.F和G.L,前10个特征所占比例分别为34%和36%,与3.6.A节的分类结果一致。B稳定,在所有树种中具有较高的ua和PA,说明前10个特征是相关的,树种特征突出,分类精度高。
树种分类结果
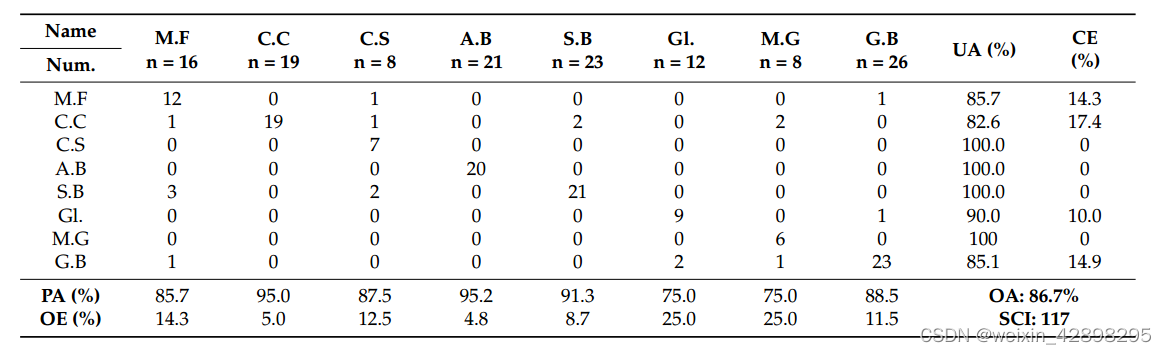 基于147个强度频率特征的RF模型树种分类结果如表所示。其中Num为验证集中这些树种的个数。树种分类的UA可以从100%到82.6%不等。3种树种的PAs达90%以上,3种树种的PAs达85%以上,2种树种的PAs达75.0%。最低的CE为0%,最低的OE为4.8%。AU高于PU, CE低于OE。这表明强度频率可以为树种分类提供有效的信息。利用强度频率特征进行树种分类精度高。
基于147个强度频率特征的RF模型树种分类结果如表所示。其中Num为验证集中这些树种的个数。树种分类的UA可以从100%到82.6%不等。3种树种的PAs达90%以上,3种树种的PAs达85%以上,2种树种的PAs达75.0%。最低的CE为0%,最低的OE为4.8%。AU高于PU, CE低于OE。这表明强度频率可以为树种分类提供有效的信息。利用强度频率特征进行树种分类精度高。
4 讨论
结果表明,激光雷达强度频率与PCS和RF算法相结合,可以实现研究区8种城市森林树种的高精度分类。
在树种分类中,强度频率与个体强度相比也有优势。单一强度只能反映整个树冠某一点的特征,承载的信息有限。如果存在其他地物反射的点云,可能会对分类结果造成较大干扰。而强度频率是整个冠层所有强度的集合,即承载强度信息,抗干扰能力较小。强度频率可以提供类似于光谱反射曲线的伪波形特征。伪波形的强度频率特征比单值特征能提供更多的树种差异信息。
目前使用强度进行树种分类的研究包括
(1)将强度转换为光栅图像,然后结合其他特征进行物种分类。该方法的优点是保留了强度数据的空间分布特征,缺点是单位栅格强度值是投影到像素中的点的强度之和或这些强度值的标准差,这可能会在一定程度上丢失强度响应的目标物体的结构。
(2)利用多个不同波长的激光雷达传感器构建植被指数,用于树种分类。该方法的优点是通过构建植被指数来增强不同树种之间的差异,从而使树种分类更加容易。缺点是从不同通道获取数据需要使用多个传感器进行多次重复操作,耗时长,成本高。此外,能够诱导各树种强度曲线响应的植被指数尚不明确,这也是未来值得研究的方向。
本研究存在一些局限性——复杂地形、数据集大小
(1)ITC分割的局限性;该方法适用于点云,可以准确分割ITC。然而,在复杂地形、复杂森林条件和自动获取分段冠层的情况下,不可避免地会产生随机或系统误差,导致分类误差升高。
(2)本研究区域的地形相对平坦。在地形复杂的情况下,每个冠层的数据噪声较大,分类的可靠性较差。此外,在强度校正过程中,我们将观测误差t视为常数,这也可能导致强度校正出现误差。
(3)树冠的多样性。理论上,不同树种具有不同的光谱反射率特性,同一树种具有相似的光谱反射率特性。然而,冠层结构、叶片形状和反射率随年龄的变化引起的冠层多样性增加了种内变异性和分类误差概率。因此,按树高或树龄分层是否能提高分类性能,还需进一步研究。
(4)随机森林模型使用来自特定区域的有限数量的样本进行训练,如果没有额外的训练样本来解释地点变化,则很难在更广泛的范围内应用。
5 结论
提出了一种基于无人机-LiDAR强度频率特征的树种分类方法,即从LiDAR数据中提取强度频率特征,结合PCS算法将获取的点云分割为ITC和随机森林模型,对研究区域的主要树种进行分类。在研究过程中,从四个密度的重采样ITC点云中提取不同树种的强度频率特征,然后利用RF模型对树种进行分类。研究结果表明,4种密度点云的强度频率特征对研究区8种主要树种的分类精度较高,即使将点云密度重采样至30%,树种分类的总体精度仍可达到84%以上。因此,无人机-激光雷达强度频率特征可用于不同树种的分类。此外,强度频率特征选择是实现树种分类精度的相关保证,平均秩(mean rank, MR)是实现重要强度频率特征选择的一种很有前景的方法。在未来的工作中,我们将在单个树冠的智能分割方面进行进一步的研究,并将激光雷达强度频率与高光谱遥感数据相结合,实现树种的智能识别,这是当前相关研究的另一个热点。















 2288
2288











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









