






1. 引言
永磁同步电机因具有高效率、高功率密度等优点,在数控机床以及家用电器等场合中应用广泛。传
统电机变频系统需要大容值电解电容来维持母线电压恒定,并通过功率因数校正(power factor correc-tion,PFC)电路实现电网侧和电机侧的功率解耦,从而提升网侧输入功率因数。但是,电解电容极易受环境温度的影响,进而影响电机驱动系统的运行寿命。采用小容值的薄膜电容代替大电解电容并省去PFC电路,可以有效提高电机驱动系统的可靠性,但母线电压随着电网电压产生大幅度波动,导致系统的输入功率因数难以满足实际应用的要求。因此,无电解电容永磁电机变频系统的高功率因数控制研究在工业界和学术界都越来越受到关注。
本文研究一种高功率因数无电解电容永磁电机变频系统逆变器电流控制策略。在分析系统输入电流导通角和相位偏移角对功率因数影响的基础上,结合输入电流导通角对逆变器电流进行控制,并采用带相位补偿的比例谐振控制器对系统延时进行补偿,其输出作为电机q轴电流给定。进一步利用电网电流的间接微分量前馈补偿到电机q轴电流给定上,无需增加额外的电流传感器,以提升逆变器电流控制效果。最后,在无电解电容永磁压缩机驱动实验平台上验证了控制策略的有效性。
2. 系统输入功率因数分析
单相无电解电容永磁同步电机变频系统的主电路结构如图1所示,主要包括网侧滤波电感、单相不
控整流器、母线薄膜电容、三相逆变器和永磁同步电机。
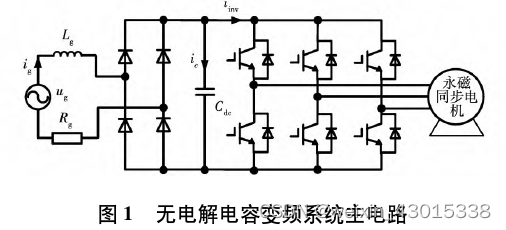
无电解电容变频系统采用小容值薄膜电容代替传统的大电解电容,使得驱动器的体积显著减小,提
高了系统的可靠性和寿命。同时,可以通过控制三相逆变器-电机侧以提高系统输入侧的功率因数,在拓扑上省去了PFC单元,使得主电路结构进一步简化。
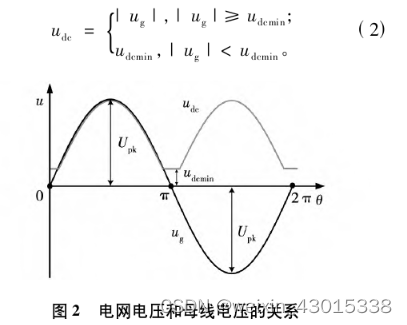
2.1 电网电压和母线电压分析
电网电压和母线电压的关系如图2所示,考虑输入的单相电网电压为理想正弦波,其表达式为
![]()
式中:Upk为电网电压幅值;θ为电网电压实时相角。在无电解电容变频系统中,直流母线侧的薄膜
电容无法存储较大的能量,使得母线电压呈周期性脉动。当电机运行时会产生反电势,母线电压将不会跌落到0,而是存在一个母线电压最小值udcmin。考虑滤波电感值较小,当|ug|大于udcmin
时,udc近似等于|ug|,此时二极管导通,输入电流流向逆变器-电机侧;当|ug|小于udcmin,则udc维持在最小值,此时输入电流为0。母线电压可以表示为
2.2 功率因数和输入电流分析
根据图1,可以得到输入电流的表达式为
|ig|=ic+iinv。(3)
式中:ic为母线电容侧电流;iinv为逆变器侧电流。
同时,电网电压和输入电流满足如下关系:

式中:Lg为网侧滤波电感;Rg为线路电阻;udc为母线电压;sgn()为符号函数。通过式(4)可知,输入电流将会受到网侧滤波电感以及直流母线电压的影响。当二极管导通的时候,由于网侧滤波电感的续流作用,输入电流在过零点处不会发生突变,电网电压和输入电流之间的关系如图3所示。
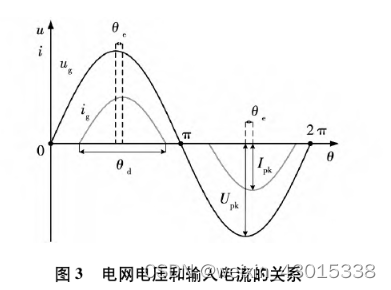
在图3中,假设二极管的导通宽度为θd,电网电压与输入电流之间的相位偏差为θe,输入电流的表
达式为
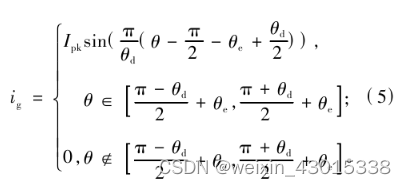
式中Ipk为输入电流幅值。根据式(5),输入电流有效值的表达式为
结合式(1)和式(5),可以得到系统输入功率的表达式为
根据式(6)和式(7),系统输入功率因数的表达式为
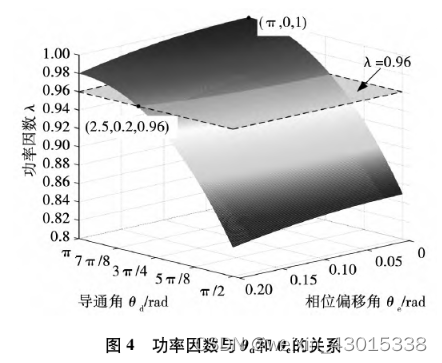
式中s为系统的视在功率。由式(8)可知,系统输入功率因数与导通宽度θd和相位偏差θe密切相关。图4为系统输入功率因数与θd和θe之间的关系,可以看出,当输入电流的导通角θd一定时,功率因数随着θe减小而增大;当电网电压和输入电流之间的相位偏差θe一定时,功率因数随着θd增大而增大。当θe=0.2 rad时,θd大于2.5 rad才能够使得功率因数达到0.96以上。当θe=0 rad、θd=πrad时,可以获得单位功率因数。基于上述的分析可知,系统的输入功率因数主要受到输入电流的影响。因此,为了获得单位的系统输入功率因数,需要消除输入电流与电网电压之间的相位偏差θe,然后,在此基础上使得输入电流的导通宽度θd达到π。
3. 逆变器电流控制策略
通过上一节分析可知,为了提高系统的输入功率因数,需要使得输入电流与电网电压保持同相位,
同时增大输入电流的导通宽度θd。为此本文提出一种逆变器侧电流控制策略,由式(3)可知,系统输入电流与逆变器侧电流密切相关,可以通过控制逆变器侧的电流来间接调节系统输入电流,达到提升系统输入功率因数的目的。考虑理想情况下,忽略逆变器的开关和通态损耗时,可以近似认为系统的输入功率等于电机侧的输出功率。由此可以得到系统输入电流的幅值表达式为
式中:T*为转速环输出的转矩给定值;ωm为电机的机械角速度;Urms为电网电压的有效值。在实际工况下输入电流的导通角难以达到πrad,需要获取输入电流的导通角θd,进一步使得输入电流的相位与电网电压保持一致,结合式(9),可以得到系统输入电流参考值的表达式为
其中输入电流的导通角表达式为
通过式(2)可以得到直流母线电容侧的电流表达式为
式中ωg为电网电压角频率。结合式(10)和式(12),可以得到逆变器侧参考电流的表达式为
实际的逆变器侧电流由逆变器侧的输出功率决定,其表达式为

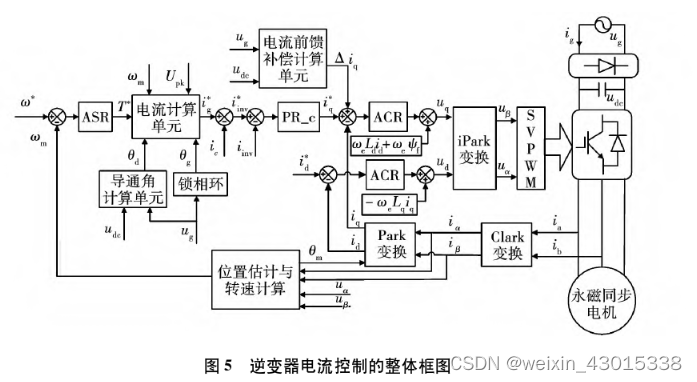
式中:ud、uq为逆变器dq电压;id、iq为dq电流。图5为逆变器电流控制策略的系统框图。将电网电压经过锁相环得到电网电压相角θ,根据式(13)计算得到逆变器侧参考电流,其中导通角θd由电网电压和母线电压实时计算。将逆变器参考电流和逆变器实际电流的差值作为逆变器电流控制环的误差,这个误差由带相位补偿的比例谐振(propor-tional resonant with compensation,PR_c)控制器进行调节,其输出作为电机q轴电流的给定值。同时为了进一步提高逆变器电流控制的效果,对电机q轴电流加入前馈补偿环节,能够实现系统输入高功率因数。
3.1 考虑系统延迟的相位补偿
PR_c控制器相比于传统的PR控制器,不仅能够实现对呈周期性变化的逆变器电流信号跟踪,还
通过相位超前角对逆变器电流环起到相位补偿的效果,其表达式为
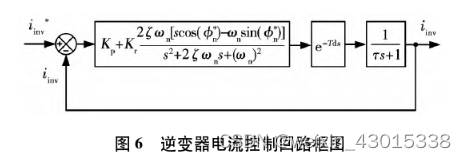
式中:Kp、Kr分别为比例和谐振增益;ζ为控制器的阻尼系数;ωn为谐振频率;φ*n为相位超前角。忽略dq轴电流耦合和电机反电势的影响,逆变器电流控制回路框图如图6所示。图中:Td为系统延迟;τ为电机绕组时间常数。其中当阻尼系数ζ较大的时候,可以提高控制器的带宽,但是会降低在ωn处增益,考虑频率波动以及谐振频率处的跟踪性能,阻尼系数ζ可以选取为0.01。同时,相位超前
角φ*n提供了额外的控制自由度,可以用来补偿控制器的相位滞后和系统延时。
根据图6,可以推导出逆变器电流控制回路的相位表达式为

利用PR控制器在谐振频率附近处的相位极值条件,可以得到PR控制器的最小相位表达式为
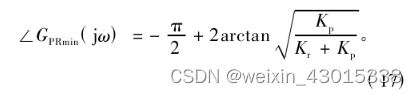
为了保证控制系统的稳定性,选取相位裕度为60°,结合式(16)和式(17),可以推导出相位超前角
φ*n的表达式为
PR_c控制器在未考虑和考虑相位超前角下的波特图如图7所示,可以看出,通过实施相位超前
角,使得在谐振频率附近处的相位有了明显的提升,也能够满足系统延时补偿的需求。同时,补偿前后对谐振频率处的幅频特性影响较小,能够保证周期性逆变器电流信号的跟踪效果。

3.2 q轴电流前馈补偿
在第1节中,功率因数表达式(8)仅考虑了电网电流为基波的情况,在实际中电网电流与电路拓
扑、负载类型等密切相关,则实际工况下的电网电流i'g表达式为

式中:I1为基波分量的幅值;Ih为h次谐波分量的幅值。图8为系统输入功率因数与输入电流谐波的关
系,可以看出功率因数还与输入电流谐波相关。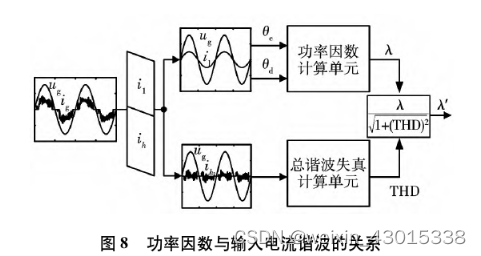
考虑输入电流谐波后的功率因数表达式为
式中THD为总谐波失真因数,即
由式(20)和式(21)可知,谐波含量增大会使得THD的值增大,从而导致系统输入功率因数降低。因此,为进一步提高功率因数,应当减小输入电流中的谐波含量。所以,在上述逆变器电流控制环的基础上加入q轴电流前馈补偿环节,通过输入电流的间接微分模型,得到输入电流的变化量,以此补偿到电机q轴电流上,进一步提高逆变器电流控制的效果。当忽略等效线路阻抗,由式(4)可以得到输入电流微分模型的表达式为

将式(22)中的输入电流ig作为状态变量,等式左侧恰好是输入电流的变化率,因此,可以利用电网
电压和母线电压来计算输入电流的变化量,其表达式为

式中Ts为采样周期。通过式(23)计算得到输入电流的变化量,可以间接地预测输入电流的变化趋势,将其作为补偿分量来控制电网电流。但输入电流的变化量与采样时间Ts和滤波电感Lg相关,过小的补偿不能有效控制输入电流,另外补偿分量偏大会给系统引入大的扰动量,对控制器性能提出了更高的要求。图9为q轴电流前馈补偿的控制框图,仅考虑输入电流导通阶段,将补偿量叠加到逆变器电流环路的输出上,即q轴电流给定上,达到前馈补偿的效果,其中K为补偿系数。

3.3 d轴电流弱磁控制
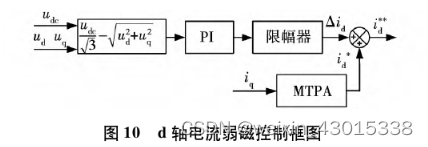
根据第一节的分析,在无电解电容变频系统中母线电压会发生周期性波动。当母线电压处在udcmin附近的时候,会导致三相逆变器-电机侧的供电电压不足,从而影响电机稳定运行,因此需要采用d轴电流弱磁控制策略。当电机的运行转速较低的时候,电机采用最大转矩电流比(maximum torque per ampere,MTPA)的控制策略来提高电流利用效率,d轴电流表达式为
随着电机的转速增加,为了保证电机运行时的电压约束条件,再增加采用电机电压反馈的弱磁控
制策略。图10为d轴电流参考值计算框图,当电机的d轴和q轴电压合成幅值超过电压约束条件时,
在MTPA所计算出的d轴电流上再叠加弱磁电流补偿值。
4. 实验结果
为了验证所提逆变器电流控制策略的有效性,搭建了无电解电容永磁压缩机驱动实验平台,如图11
所示。其中控制芯片采用TI公司的TMS320F28034,开关频率为10 k Hz,电流环执行周期为100μs。同时相位超前角φ*n设置为0.25π,前馈补偿系数K设置为8。采用录波仪测量实验波形,采用电能质量分析仪对电网侧输入电压电流进行功率因数测量和谐波分析。
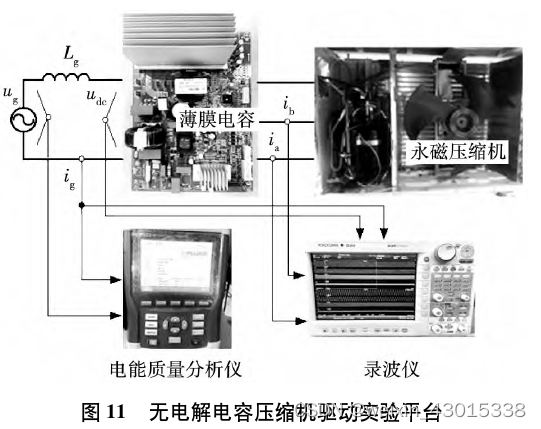
图12为无电解电容实验平台上分别采用传统功率控制方法、电压前馈补偿控制方法以及所提出的逆变器电流控制方法进行压缩机功率为700 W下的实验结果。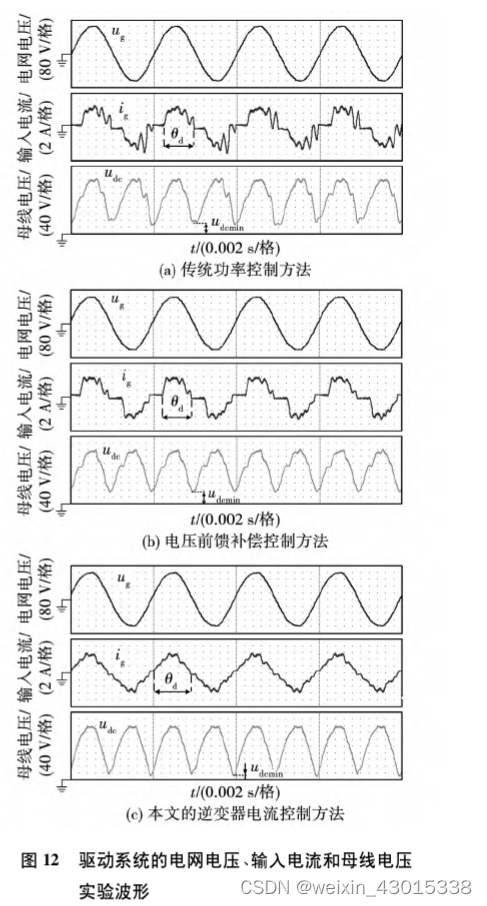
图12(a)为传统功率控制方法下的电网电压、输入电流和母线电压实验波形,其中母线电压中含
有显著的纹波分量,母线电压最小值udcmin约为80 V,输入电流导通角约为2.62 rad。这是因为传统功率控制方法仅针对输入电流中的基波成分进行控制,导致输入电流中的谐波含量较大,使得功率因数受到限制。
图12(b)为电压前馈补偿控制方法下的电网电压、输入电流和母线电压实验波形,其中母线电压中
的纹波分量有所减少,母线电压最小值udcmin约为70 V,输入电流导通角约为2.69 rad。这是因为电压前馈补偿控制方法是针对输入电流中的谐波进行补偿控制,可以有效降低谐波含量,但是无
法进一步增大输入电流的导通角以提高功率因数。图12(c)为逆变器电流控制方法下的电网电压、输入电流和母线电压实验波形,其中母线电压中的纹波分量能够被有效抑制,母线电压最小值udcmin约为30 V,输入电流导通角约为2.95 rad,说明本文的逆变器电流控制方法能够有效提高输入电流的导通角。可见,采用本文的逆变器电流控制策略,能够有效增大输入电流导通角并降低
谐波电流,功率因数提升显著。
5. 结论
针对无电解永磁电机变频系统,本文研究了一种无电解电容永磁电机变频系统逆变器电流控制策
略。能够有效增大输入电流导通角,降低谐波电流,达到高功率因数效果。得到的结论如下:
1)分析系统输入功率因数与电网电压和输入电流之间的关系,为实现系统单位输入功率因数,需
要消除输入电流与电网电压之间的相位偏差θe,在此基础上使得输入电流的导通宽度θd达到π。
2)结合输入电流的导通角,对逆变器电流进行控制,并利用带相位补偿的比例谐振控制器对系统
延时进行补偿,其输出作为电机q轴电流给定,能够实现通过控制逆变器电流来间接控制输入电流,显著提高了系统输入功率因数。
3)利用电网电压和母线电压间接获取输入电流的微分量,并前馈补偿到电机q轴电流给定值上,
以提升逆变器电流控制效果,能够有效降低输入电流中的谐波电流。
















 339
339

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











