






论文题目:High-Performance Feature Extraction Network for Point Cloud Semantic Segmentation
论文地址:https://ieeexplore.ieee.org/abstract/document/10474110
分为三个部分:平面几何特征的提取,几何和语义特征融合以及Transformer提取特征。
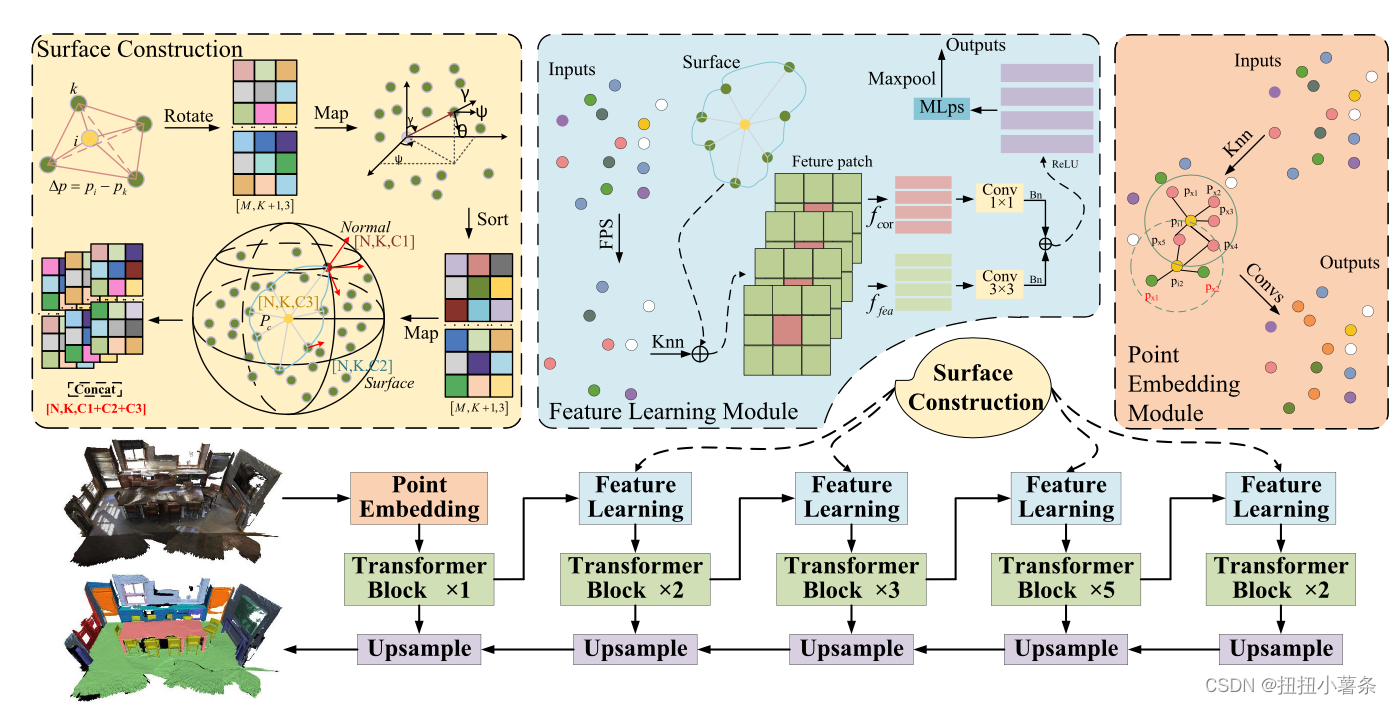
1. 平面几何特征的提取
先旋转再提取平面特征再结合自身坐标特征。
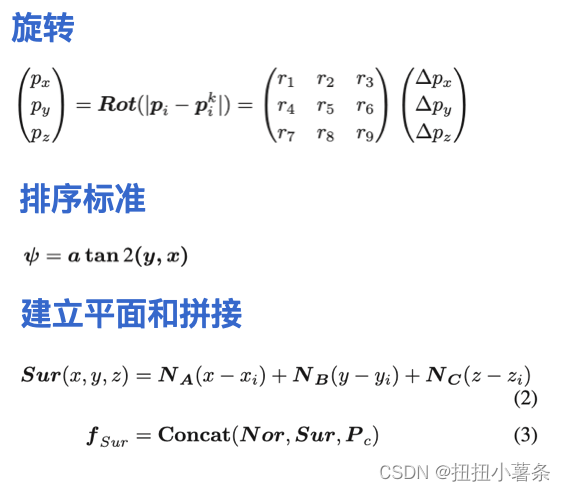
2. 几何和语义特征的分开处理

坐标使用1x1卷积处理,特征使用3x3的卷积增加感受野。因为排序了所以可以使用3x3卷积。
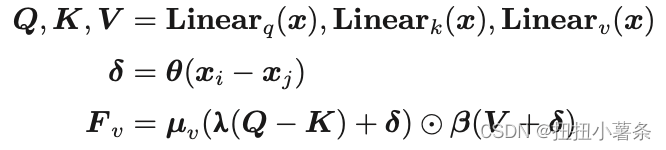
3. Transformer模块
4. 结果:

结果超过base
5. 网络和模块参数量分析:
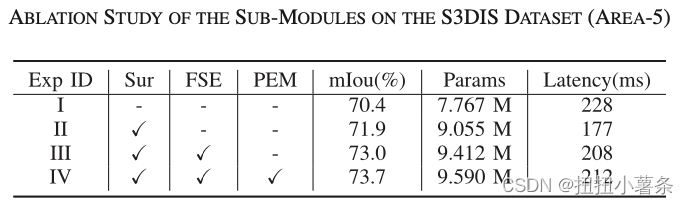
参数量也较少















 797
797

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









