







简介
无模型自适应控制[MFAC]如其名字所示,是一种不依赖于模型的控制方法。MFAC控制系统具有以下特征:
无需掌握控制过程精确的量化的了解。
系统无需包含辨识机制
无需手动调参
闭环系统的稳定性能够保障
- SISO 的 MFAC可以作为PID的平替
- 可用非线性的MFAC来控制非线性过程
- MFAC pH控制器可以控制 pH过程
- 前馈MFAC控制器可以处理可测扰动
- 抗延迟MFAC能处理大延迟过程控制
- 鲁棒MFAC能将过程变量保持在设定边界内
- MIMO MFAC能处理多变量过程控制
MFAC的概念
系统描述问题
绝大多数的先进控方法是建立在对系统有着深入的理解的基础上的。常用传递函数或差分方程等数学方法来描述被控系统。然而在许多场合中,由于系统过于复杂,无法对其进行清晰的理解,也就无法对其进行量化。这也就被称为是黑盒问题。
在实际应用中,工程师也无法确定其建立的对系统的数学描述是否精确。比如燃料控制问题,经常会碰到流入的不稳定,燃料类型的变化,热值的改变,无法预测的下游需求改变,以及产品大小,成分,批量,载荷的切换。这就导致了一个常见的问题,即,工程师无法确定已掌握的知识是否能精确描述系统,也会是灰盒问题。
系统辨识问题
在传统的自适应控制方法中,如果无法获得系统精确量化的数学描述,那么就需要设计一个在线/离线的辨识器来得到系统动态。这引入了以下问题:
- 可能需要进行头疼的离线训练
- 精确的系统辨识和稳定的控制相应无法同时达到
- 系统回归和局部最优问题
- 系统的稳定性问题
基于识别的控制方法不太适合过程控制的主要原因是控制和识别总是冲突的。良好的控制将使得系统处于稳定,即设定点(SP)、控制器输出(OP)和系统变量(SV)将在变化趋势图上显示为直线。
MFAC控制不会引入系统辨识。一旦MFAC起作用,就会立即开始控制。MFAC算法基于单一目标——减少设定值SP和系统变量SV之间的误差,来更新权重系数。这也就意味着,当系统稳定后,误差趋近于0时,无需更新权重系数。
控制器的设计问题
PID之所以流行的原因是它是一种通用性的控制,无需控制器的设计过程。为特定应用设计控制器需要特殊的专业知识。由于大多数高级控制器都是基于模型的,它们就无法变成通用控制器,因此,它们不是广泛应用于控制,尽管这些方法已经发展了30到40年。
对于MFAC控制器使用者来说,不需要控制器设计程序。可以简单地选择如其名称所示的适当控制器,使用某些参数配置控制器并启动MFAC控制器。这是无模型自适应控制器和其他基于模型的高级控制器之间的主要区别。
SISO 无模型自适应控制器
SISO MFAC 控制系统如下图:
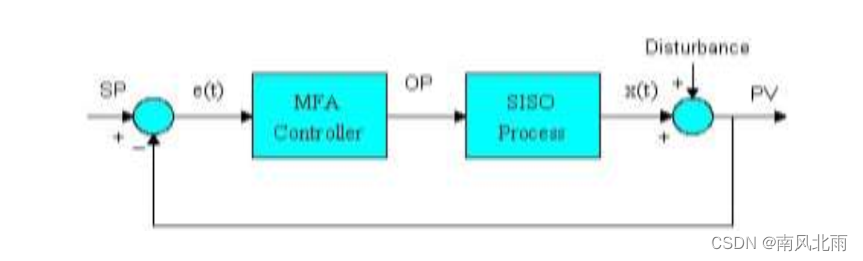
控制器的控制目标是产生上图所示的输出U(t)作为OP迫使上图中所示的过程变量Y(t)作为SV,以跟踪其设定点R(t)的给定轨迹如上图所示,在设定值、扰动和过程动力学变化下的SP。换句话说,MFA控制器的任务是以在线方式最小化误差e(t),E(t) = SP - SV。通过MFAC的调节能力能保证误差最终趋向于0。权重系统的更新能处理系统变化,干扰和其他不确定性。
SISO MFAC控制器架构
SISO MFAC的核心架构如下图,作为一个多层感知器神经网络由一个输入层、一个包含N个神经元的隐藏层和一个具有一个神经元的输出层。
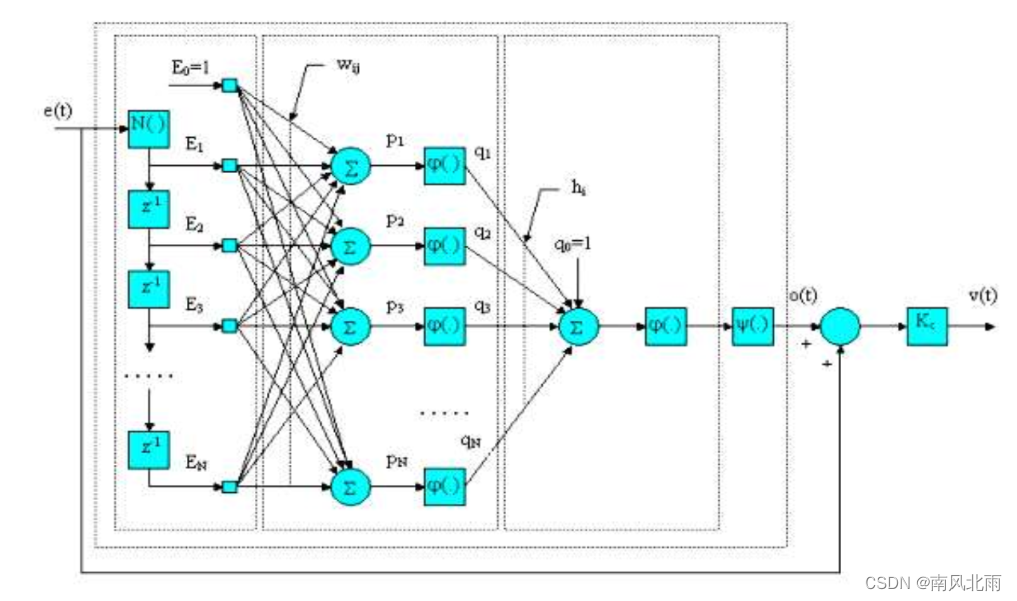
在神经网络中,有一组加权因子(wij和hi)可以更新为需要改变控制器的行为。用于更新加权因子的算法基于目标是使设定点和过程变量之间的误差最小化。由于这种方式与控制相同,加权因子的自适应可以在系统动力学正在发生变化的同时让控制器最小化误差。此外,基于人工神经网络的MFA控制器“记忆”过程数据的一部分为系统动力学来提供有价值的信息。相比之下,数字PID控制器的只保留当前和之前的两个采样值。在这方面,PID几乎没有记忆,MFA拥有对“智能”控制器来讲至关重要的——记忆。
SISO MFA控制器的概念公式为:
其中,K是MFAC控制器增益。每个计算周期MFAC控制器的加权因子使用学习算法更新,以便产生正确的输出U(t)以最小化误差 e(t)。
控制SISO MFA控制器输入输出的实际算法包括以下内容差分方程。
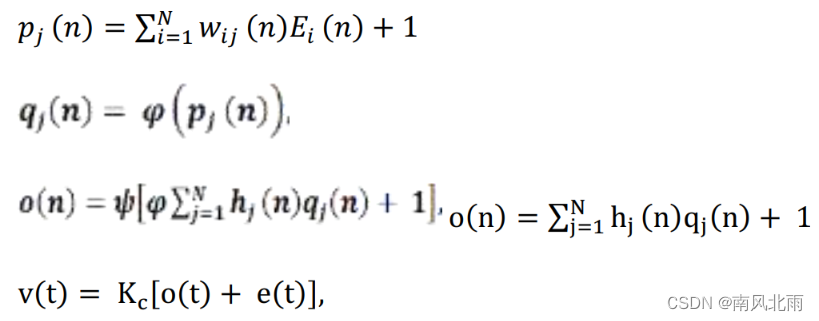
其中n表示第n次迭代,o(t)是o(n)的连续函数,v(t)为无模型自适应控制器的输出,Kc>0,控制器增益,是用于调整控制器大小的参数输出此参数有助于微调控制器性能或使系统保持稳定范围。SISO MFAC的体系结构及其相关参数和变量见上图。
使用在线学习算法来连续更新MFAC控制器如下:

他们的目标是最小化e(t),这是设定点之间的差异和过程变量。

















 1782
1782

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









