






一、认清OBVP
跟A*、RRT*的相同点:
都是前端:为了得到一个初步的曲线
都是在构建栅格网络的基础上进行搜索
跟A*、RRT*的不同点:
当前状态和下一可能状态的连接是曲线。而不是直线
二、一些疑惑与解答
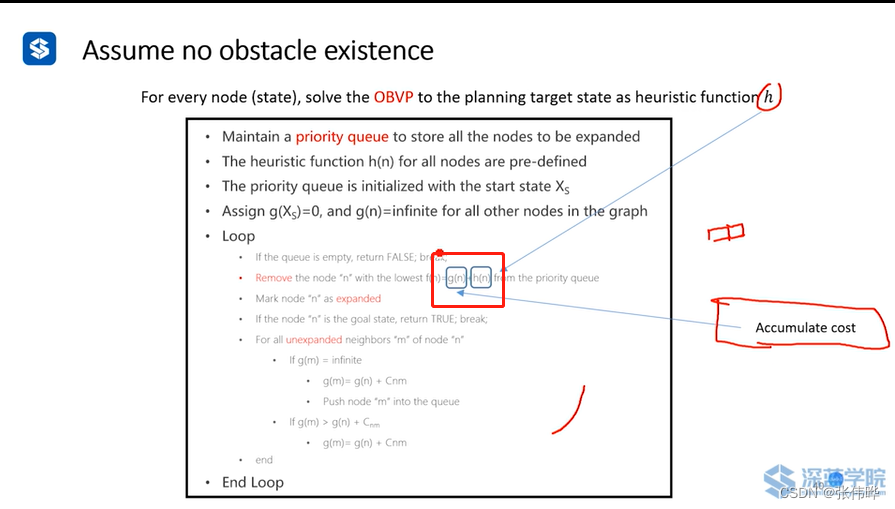
1)obvp除了用在构建栅格网络外,还可以用来计算h(n)吗?
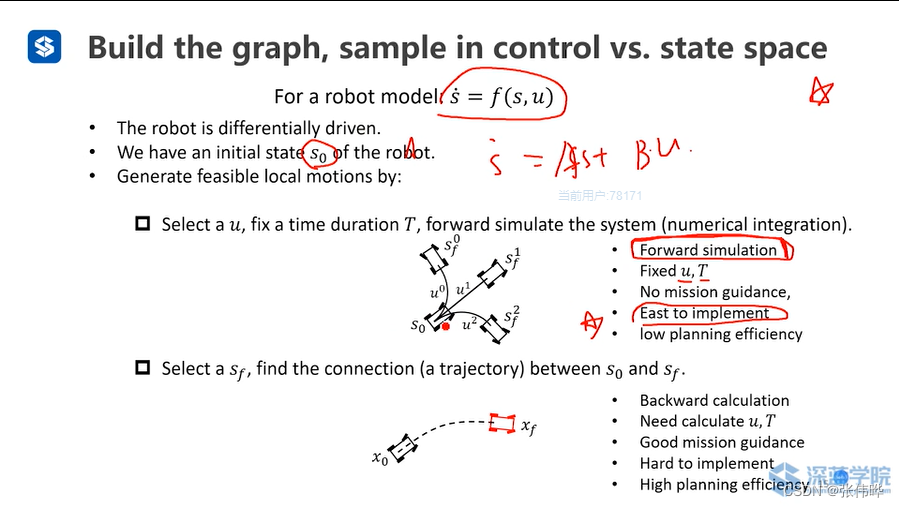
2)考虑动力学的状态空间采样,也是随机采样状态点吗
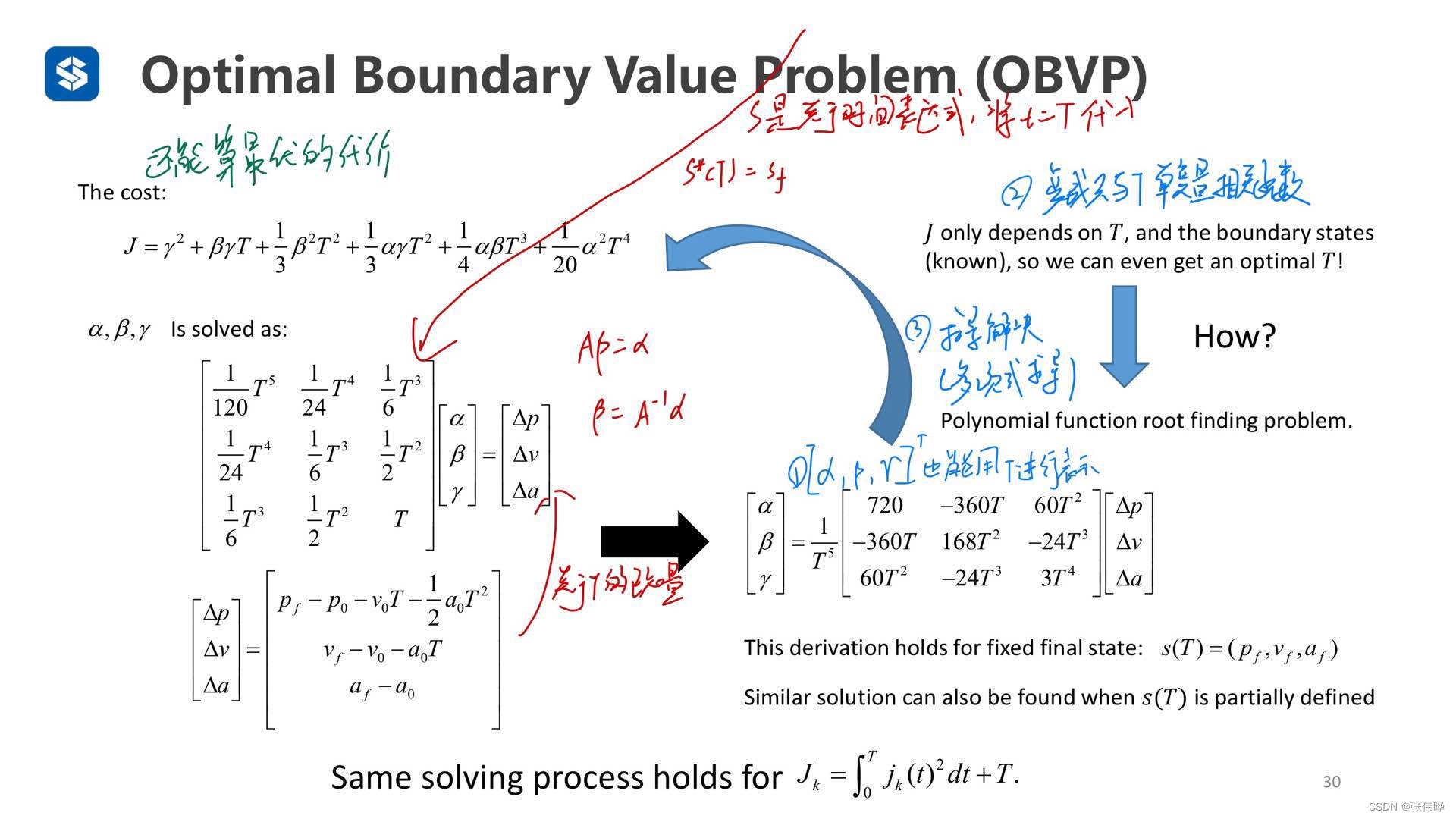
三、理解计算过程
1、求Landa
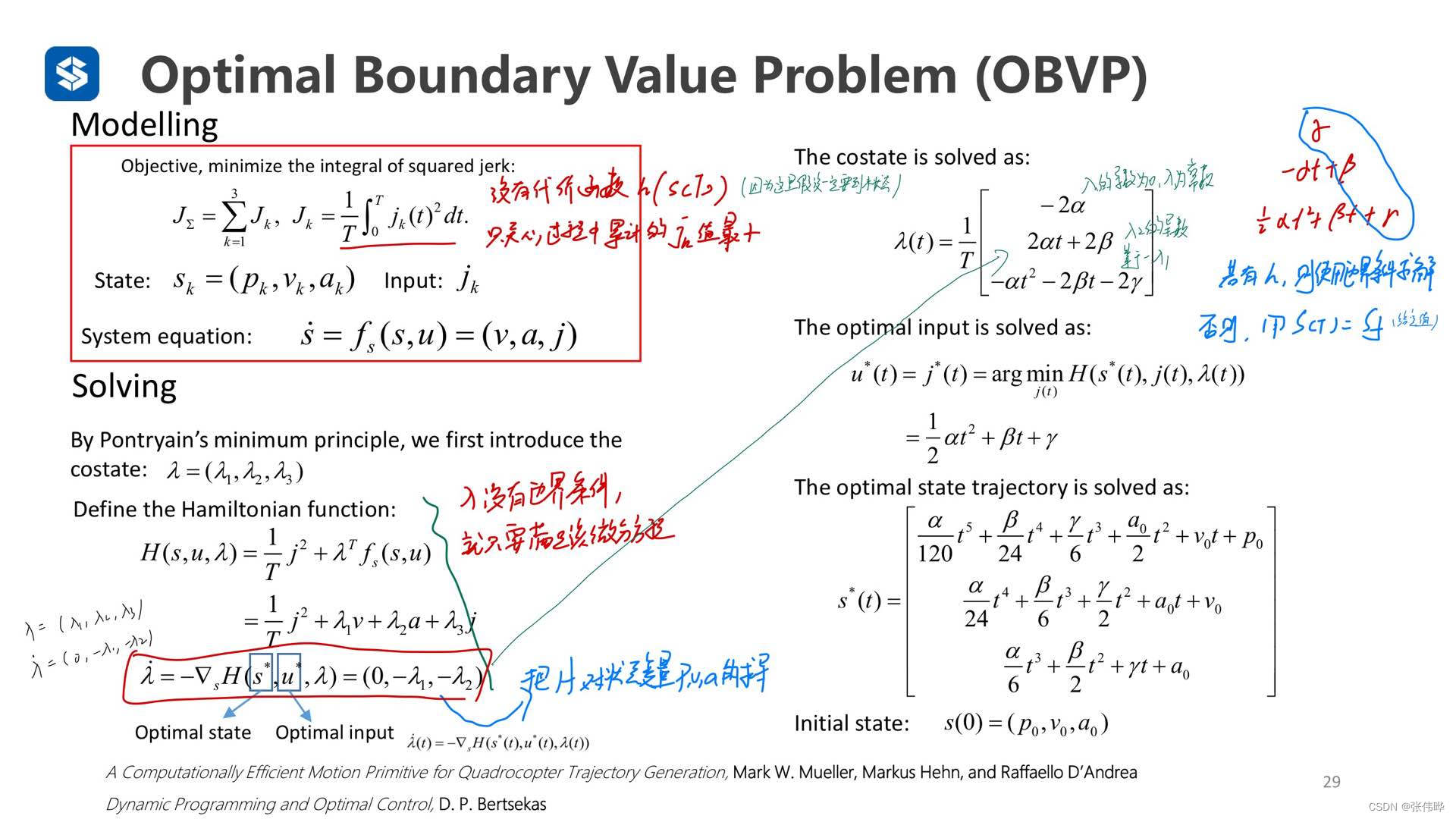
2、求u*
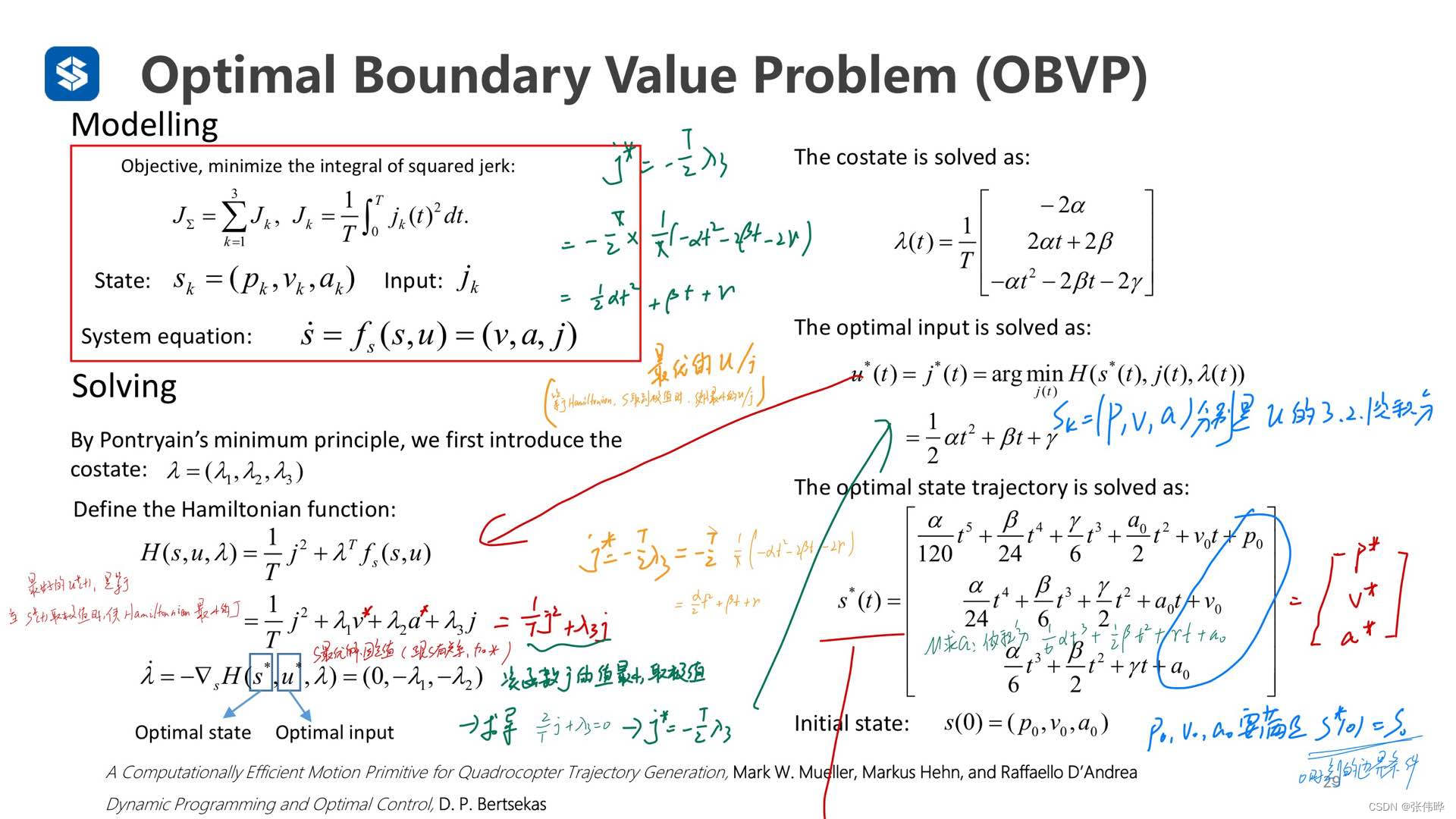
3、求最优T
一、认清OBVP
跟A*、RRT*的相同点:
都是前端:为了得到一个初步的曲线
都是在构建栅格网络的基础上进行搜索
跟A*、RRT*的不同点:
当前状态和下一可能状态的连接是曲线。而不是直线
二、一些疑惑与解答
1)obvp除了用在构建栅格网络外,还可以用来计算h(n)吗?
2)考虑动力学的状态空间采样,也是随机采样状态点吗
三、理解计算过程
1、求Landa
2、求u*
3、求最优T
 1857
1326
567
2565
6969
1857
1326
567
2565
6969











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
























