







QT上位机 通过EGM实时控制ABB
前言
感谢大佬的视频和源码,链接放上:
视频对应源码:github源码
一、展示效果

二、robot studio建立工程
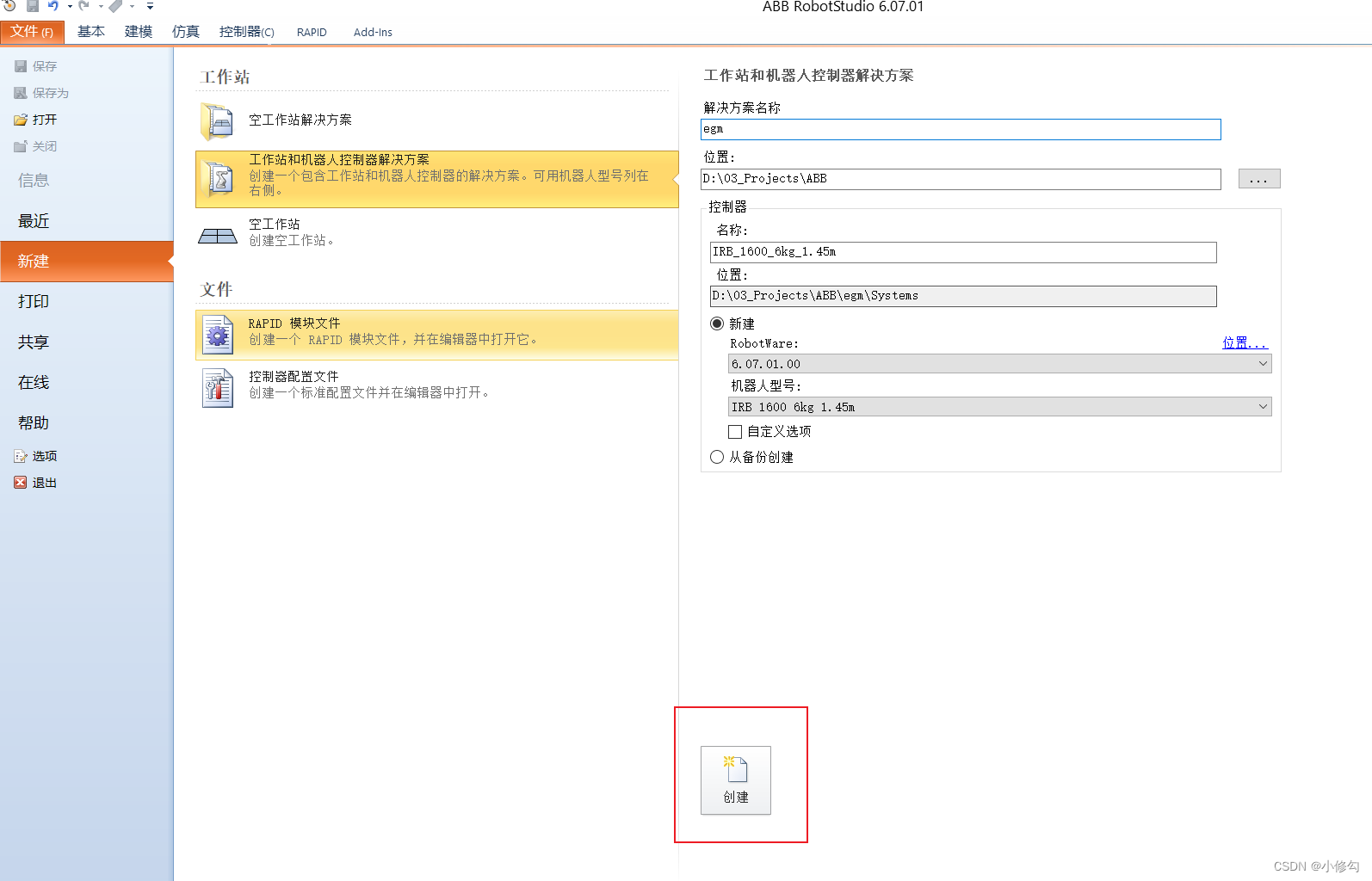
1、新建robotstudio工程
2、添加EGM通信相关设置
点击控制器——选择解决方案——右键——点击修改选项

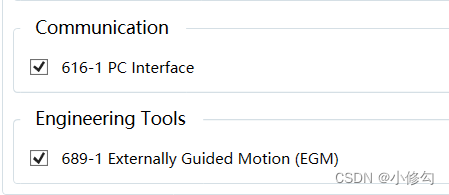
出现以下界面——通过过滤器选择需要添加的配置模块

我这里用到了这两项,一个是通讯616-1 PC,一个是EGM所需 689-1 EGM。
3、虚拟示教器设置udp相关
1、语言设置
需要先设置手动模式——控制面板——语言——中文
2、UDP端口设置,参考作者github链接中readme,设置最终如下:

4、主函数添加
在RAPID添加作者的代码即可
三、QT工程建立
1、下载源码
下载作者源码如下:

因为我用的是qt creator,所以新建了一个qt工程,把相关源码拷贝进取即可。

注意:protobuf报错,需要自己编译一下protobuf
#include <google/protobuf/port_def.inc>
#if PROTOBUF_VERSION < 3015000
#error This file was generated by a newer version of protoc which is
#error incompatible with your Protocol Buffer headers. Please update
#error your headers.
#endif
#if 3015002 < PROTOBUF_MIN_PROTOC_VERSION
#error This file was generated by an older version of protoc which is
#error incompatible with your Protocol Buffer headers. Please
#error regenerate this file with a newer version of protoc.
#endif
2、编译protobuf
注意版本,代码中设置因为3.15.1
编译:
1、下载相关源码,
2、利用cmake-gui进行编译,
3、生成的sln用vs打开,
4、all_build生成,
5、install生成
3、QT中调用
pro文件调用如下:
INCLUDEPATH += D:/PCL/protobuf__/include\
LIBS += -LD:/PCL/protobuf__/lib\
-llibprotobuf\
-llibprotobuf-lite\
-llibprotoc
qmake一下,构建一下,至此QT上位机通过EGM控制ABB机器人已经实现;

















 1287
1287











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











