






深入浅出讲解旋转变换矩阵
近来本人在自学《机器人学基础》一书,起初自以为理解了旋转变换本质,后来发觉最初的理解是不准确或者说完全错误的。于是上网查找了许多关于旋转矩阵以及方向余弦的相关文章,但发现他们所写过于复杂,或者说还没有深入浅出地解释好旋转矩阵本质。本人完全理解变换矩阵后,希望以一种简单的几何原理而不是利用空间坐标计算来解释旋转矩阵,相信看到本文之后你会完全理解旋转矩阵本质。记住一句话:旋转的本质将参考坐标系中的点,变换到固定系中。下面开始论证:
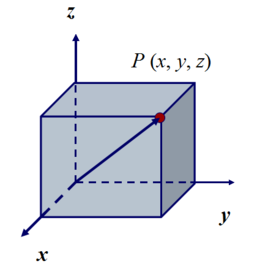
首先,假设一固定坐标系(即永远不动的坐标系,最后其他参考系的点均由此坐标系的基向量表示),用{A}表示,{A}系的三个基向量分别设为X,Y,Z。本文采用右手坐标系(最常见,教科书上最常使用的那种)如下:
好了,现在我们假设{A}系绕自身的X轴旋转θ角度(注意:右手系以逆时针方向为证),这时我们得到了一个新的坐标系,也就是我们所说的参考坐标系,设为{B},设{B}的基向量为X’,Y’,Z’。
我们都知道,坐标系绕自身X轴旋转θ角度得到的旋转变换矩阵如下:
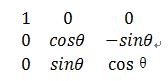
我们知其然,现在就要知其所以然了。重复一下:旋转的本质将参考坐标系中的点,变换到固定系中。好了,我们现在假设参考系{B}中有一点P,其在B系中坐标为(a,b,c),则向量P可以表示为a X’+ bY’+c Z’。好了,P点在参考系{B}中的位置明确了,但是我们需要的是它在固定坐标系{A}的表示,因此,必须将P向量表示成AX+BY+CZ的形式。自己画一个单位圆,我们可以很容易推导出
X’=X
Y’=Ycosθ+Zsinθ
Z’= Zcosθ-Ysinθ
因此
向量P固定坐标系{A}的表示为a (X)+ b(Ycosθ+Zsinθ)+c (Zcosθ-Ysinθ),整理得:
a X+(bcosθ-csinθ)Y+( bsinθ+ ccosθ)Z。这和旋转坐标系得出的结果是一致的。旋转坐标系只是将矩阵[X’,Y’,Z’]表示成[X, Ycosθ+Zsinθ, Zcosθ-Ysinθ],这样与参考系{B}中的P点坐标相乘后,P点自然而然就等价表示在固定坐标系{A}中了。要注意:此处的向量应以列向量给出,也就是旋转矩阵了,这样直接相乘后得出的点才是我们最后整理得到的点坐标。
还是那句话:旋转的本质将参考坐标系中的点,变换到固定系中。















 5544
5544











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









