






由于仿真台架的位移输出是在模型当中,且整体对实时性要求较高,故采取用NI PXI实时机通过Ethercat协议控制伺服,本文中的伺服为汇川的SV660N,Veristand 2021版本
接线上,需要将伺服驱动器的IN网口和实时机CPU的网口直连即可
然后,我们进行软件驱动的配置
在上位机上我们需要安装
1.NI compactRIO 21.0
2. NI Industrial communicatios for EtherCAT
3.Labview 2021 SP1(32bit)以及相应的Real-Time和FPGA模块
(此两软件版本需和下位机保持一致)
同时需在下位机我们需安装
1.scan engine custom device(ni-scan-engine-veristand-<version>-support-23.30.6-windows-x64.nipkg)
2. NI Industrial communicatios for EtherCAT
3.NI RIO
4.I/O variable remote configuration wev service
所有驱动安装完毕后,如下图所示更改下位机以太网接口,
重启后,打开Veristand,新建工程,来到系统配置界面,按照下图依次完成操作
其中,导入的xml文件为伺服的通讯协议,其中7是应在文件导入后操作,
完成auto-check后,如提示下图报错,一般为通讯协议文件存在问题,无法识别对应的IO
成功识别后,按照下图依次操作,其中框9为协议中规定的IO口,框10为Ethercat协议中DC时钟同步(其中同步管理器SM协调应用层和主机数据交互,实现数据同步,单靠此无法实现精致时间同步),
因此此项勾选,不然在实时机运行下,系统主从站时间无法同步,进而报错
完成上述配置后,即可depoly模型。在对应的IO口中控制并显示伺服
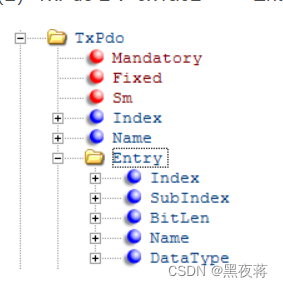
如果想对现有的IO进行修改,需通过xml文件编辑器对文件进行修改,通过拖动SM,从而控制可交互的IO口
对此请参考NI的文档,链接如下:
https://knowledge.ni.com/KnowledgeArticleDetails?id=kA00Z0000019LesSAE&l=en-US
此外,如果想添加自行修改IO卡,必须在Fixed=0的Pdo树下进行修改,方可生效。

















 2180
2180

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









